倒立振子実験装置(レール長0.6m)
本研究室で製作した,DCモータで駆動される倒立振子系の実験装置を紹介します.DCモータはPWMドライバで駆動され,台車の位置および振子の振れ角はポテンショメータで測定されます.パソコンとDSP(エムティティ
s-BOX)をコントローラとして使用し,プログラミング言語は,DSP付属のC言語を用いました.状態フィードバックによる倒立安定化や振り上げ安定化などの制御実験ができます.
設計図は2次元汎用CADソフトRootPro CAD Standard(フリーソフト)で作成しました.
本実験装置は,先に紹介した倒立振子実験装置をベースに,より広範な制御実験ができるようにレール長を0.6mとして設計したものです.
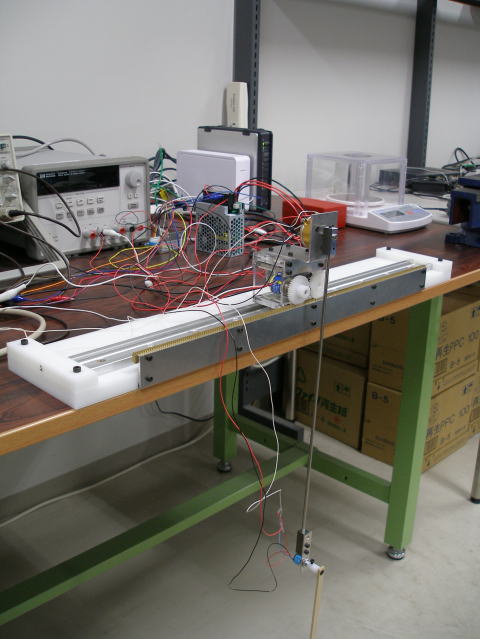
図1 倒立振子実験装置
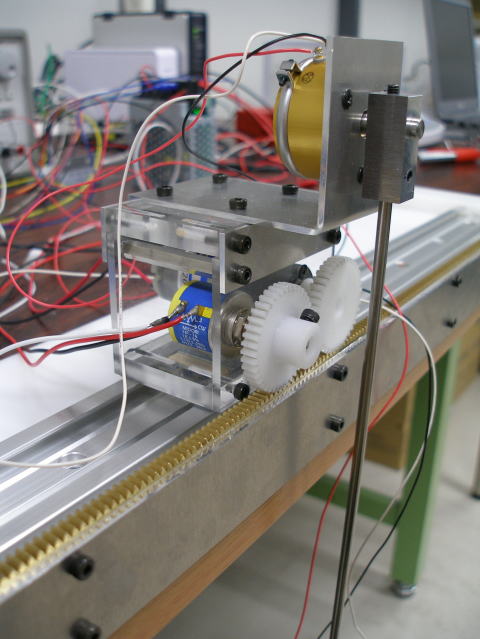
図2 倒立振子実験装置
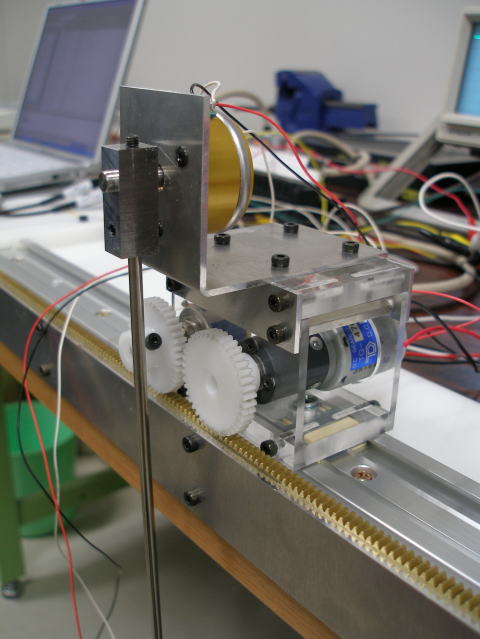
図3 倒立振子実験装置
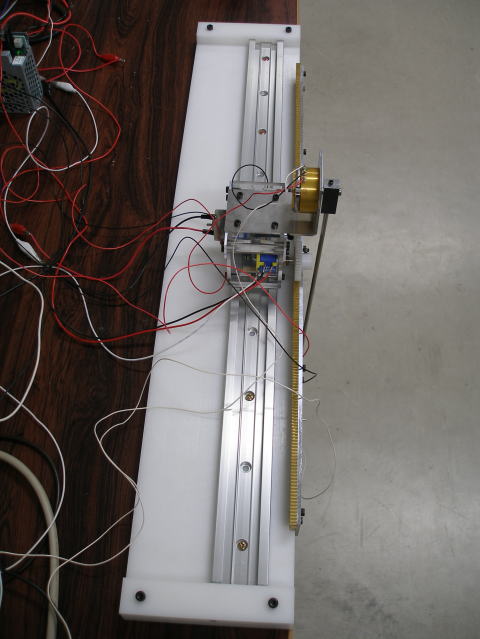
図4 倒立振子実験装置(とりあえず,動作を確認したかったので,配線はまとめていませんが,DCモータへの2本のコードは主要なノイズ源なので,これらとポテンショメータのコードが接触しないように注意しています.)
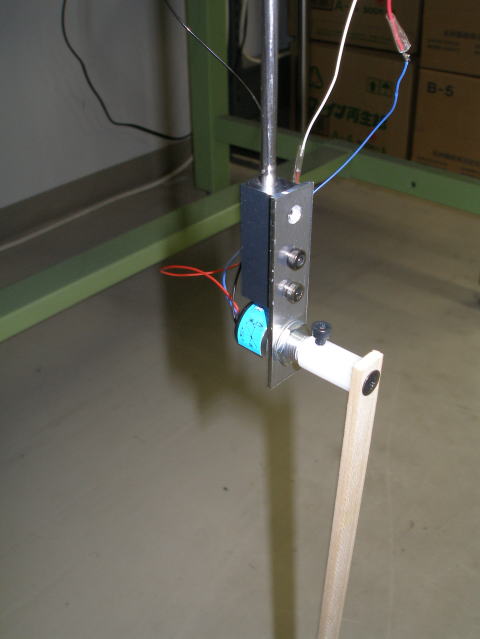
図5 倒立振子実験装置(振子部,直列二重倒立振子の場合)
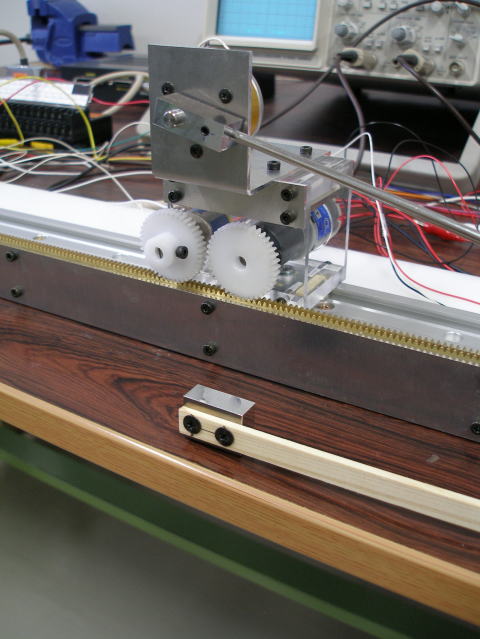
図6 倒立振子実験装置(台車部と第二振子先端,直列二重倒立振子の場合)
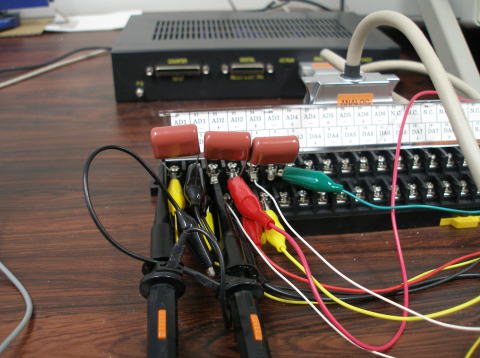
図7 倒立振子実験装置(DSPの端子台,ノイズ低減のため1μFのコンデンサを使用)
状態フィードバック制御による台車系のステップ応答テストの動画(MPEGファイル) 台車系を2次遅れ系(1/(1+Ts)^2,時定数T=0.12s)とし,矩形波入力(振幅a=0.08m)を与えました.応答波形をシミュレーション結果と重ね,制御性能を評価します.
状態フィードバック制御による倒立振子の安定化制御実験の動画(WMVファイル) 飽和制御[1]によって安定化しました(台車移動幅の上限を0.3mと設定).
状態フィードバック制御による直列二重倒立振子の安定化制御実験の動画(WMVファイル) 飽和制御([1]の拡張形)によって安定化しました(台車移動幅の上限を0.3mと設定).倒立振子の安定化は,各(等価)振子長を長くすればより簡単になり,小さな出力のモータでも可能となります.
いずれもLQや極配置法でも安定化可能と思います.
[1] K.Yoshida and I. Matsumoto, ``Stabilizing control for an inverted pendulum
with restricted travel, Proceedings of the 2009 American Control Conference,
pp. 543-548, 2009.
図面1(PDF)
図面2(PDF)
図面3(PDF)
図面4(PDF)
倒立安定化制御サンプルプログラム(ipend06_sample.c) 本プログラムは台車制御サンプルプログラム(cart_sample.c)を基に作成しました.上記の動画の実験(台車系,一重倒立振子)で使用したプログラムです.
部品表
| No. |
部品名 |
会社名 |
型番 |
個数 |
サイズ |
材質 |
備考 |
| 1 |
ギヤドDCモータ |
ツカサ電工 |
TG-47C-FU-16-KB,24V |
1 |
- |
- |
3.6W,減速比1/16 |
| 2 |
モータドライバ |
〃 |
TCP-S30-300 |
1 |
- |
- |
PWM方式 |
| 3 |
振子用ポテンショメータ |
日本電産サーボ |
N35T 5K |
1 |
- |
- |
測定角345°,振子の回転軸と軸受機構を兼ねる. |
| 4 |
台車用ポテンショメータ |
緑測器 |
HP-16 1kΩ |
1 |
- |
- |
10回転型 |
| 5 |
第二振子用ポテンショメータ |
〃 |
CP-2UN |
1 |
- |
- |
測定角90°,無接触型,直列二重倒立振子の場合 |
| 6 |
直動機器(レール) |
イグス |
NS-01-40-06 |
1 |
幅40mm,L=600mm |
アルミ合金,アルマイト処理 |
- |
| 7 |
直動機器(キャリッジ) |
〃 |
NW-02-40 |
1 |
- |
- |
- |
| 8 |
ピニオン |
協育歯車工業 |
- |
2 |
モジュール0.8,ピッチ円直径32mm |
ポリアセタール |
- |
| 9 |
ラック |
〃 |
- |
1 |
モジュール0.8,T=5mm,L=505mm |
快削黄銅 |
- |
| 10 |
台車天板支持板 |
- |
- |
2 |
T=2mm×70×18mm |
アルミ合金(A5052) |
- |
| 11 |
振子用ポテンショメータ支持板 |
- |
- |
1 |
T=2mm×125×45mm |
〃 |
- |
| 12 |
ラック支持板 |
- |
- |
1 |
T=3mm×500×32mm |
ジュラルミン(A2017) |
- |
| 13 |
台車枠(天板) |
- |
- |
1 |
T=8mm×46×70mm |
アクリル樹脂(キャスト) |
- |
| 14 |
台車枠(側板) |
- |
- |
1 |
T=3mm×50×70mm |
〃 |
φ11mm,φ12mm穴あけ |
| 15 |
台車枠(側板) |
- |
- |
1 |
T=3mm×50×70mm |
〃 |
φ29mm穴あけ |
| 16 |
台車枠(底板) |
- |
- |
1 |
T=8mm×40×70mm |
〃 |
φ6.5mm穴あけ2箇所 |
| 17 |
底板 |
- |
- |
1 |
T=15mm×120×650mm |
ジュラコン |
- |
| 18 |
側板 |
- |
- |
2 |
T=12mm×25×120mm |
〃 |
- |
| 19 |
台車枠(スペーサー(六角両めねじ)) |
- |
- |
2 |
M3,L=40mm |
ステンレス(SUS303) |
- |
| 20 |
振子とポテンショメータの連結部品 |
- |
- |
1 |
12×30×10mm |
ジュラルミン(A2017) |
- |
| 21 |
セットピース |
- |
- |
3 |
M4用 |
真鍮 |
セットスクリューと一緒に使用 |
| 22 |
振子 |
- |
- |
1 |
φ4×390mm |
ステンレス |
- |
| 23 |
セットスクリュー |
- |
- |
2 |
M4,L=4mm |
鋼 |
振子固定用 |
| 24 |
〃 |
- |
- |
1 |
M4,L=8mm |
〃 |
〃 |
| 25 |
六角穴付きボルト |
- |
- |
18 |
M3,L=10mm |
〃 |
台車枠,振子用ポテンショメータ支持板固定用 |
| 26 |
〃 |
- |
- |
5 |
M3,L=12mm |
〃 |
ラック支持板固定用 |
| 27 |
〃 |
- |
- |
5 |
M3,L=8mm |
〃 |
ラック固定用 |
| 28 |
〃 |
- |
- |
4 |
M4,L=25mm |
〃 |
側板固定用 |
| 29 |
〃 |
- |
- |
2 |
M3,L=6mm |
〃 |
ピニオン固定用 |
| 30 |
なべ小ねじ |
- |
- |
6 |
M4,L=15mm |
〃 |
レール固定用 |
| 31 |
低頭+小ねじ |
- |
- |
2 |
M4,L=12mm |
〃 |
台車固定用 |
| 32 |
ワッシャー |
- |
- |
2 |
M4用 |
〃 |
〃 |
| 33 |
スプリングワッシャー |
- |
- |
2 |
〃 |
〃 |
〃 |
| 34 |
低頭+小ねじ |
- |
- |
4 |
M3,L=6mm |
〃 |
モータ固定用 |
| 35 |
低頭+小ねじ |
- |
- |
3 |
M3,L=5mm |
〃 |
振子用ポテンショメータ固定用 |
| 36 |
スイッチング電源 |
コーセル |
LCA50S-24 |
1 |
- |
- |
24V,60W,モータドライバ用 |
| 37 |
〃 |
〃 |
PBW15F-12-N |
1 |
- |
- |
±12V,16.8W,台車用ポテンショメータ用 |
| 38 |
振子用ポテンショメータの電源 |
- |
- |
1 |
- |
- |
±10V.±10V以内のスイッチング電源で可. |
| 39 |
第二振子用ポテンショメータの電源 |
- |
- |
1 |
- |
- |
6V.5Vのスイッチング電源で可. |
| 40 |
第二振子 |
- |
- |
1 |
T=3mm×407×10mm |
ヒノキ材 |
二重倒立振子の場合 |
| 41 |
ピニオン |
協育歯車工業 |
- |
1 |
モジュール0.5,ピッチ円直径9mm,L=18mm |
ポリアセタール |
第二振子とポテンショメータの連結用 |
| 42 |
六角穴付きボルト |
- |
- |
1 |
M3,L=6mm |
鋼 |
〃 |
| 43 |
低頭+小ねじ |
- |
- |
3 |
M4,L=8mm |
〃 |
〃,第二振子の重り固定用 |
| 44 |
振子と第二振子用ポテンショメータの連結部品 |
- |
- |
1 |
T=1.5mm×60×15mm |
アルミ合金(A5052) |
- |
| 45 |
〃 |
- |
- |
1 |
T=10mm×34×12mm |
ジュラルミン(A2017) |
- |
| 46 |
第二振子の重り |
- |
- |
1 |
T=10mm×25×18mm |
〃 |
- |
最終更新日:2010年3月12日
戻る