設計図は2次元汎用CADソフトRootPro CAD Standard(フリーソフト)で作成しました.
本実験装置は,倒立振子実験装置(レール長0.6m)の振子部のみを変更したものです.
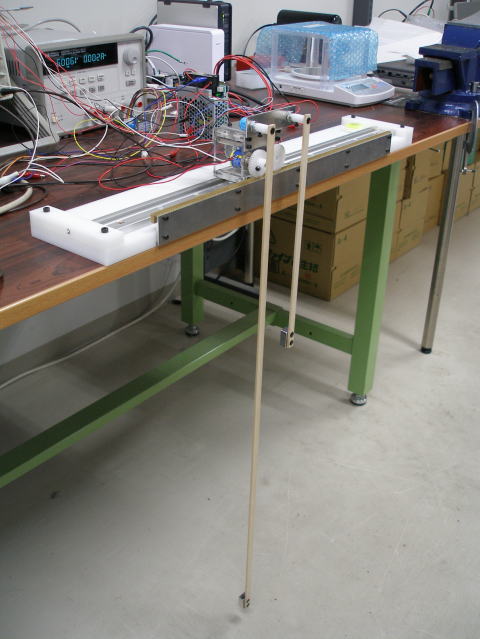
図1 並列二重倒立振子実験装置
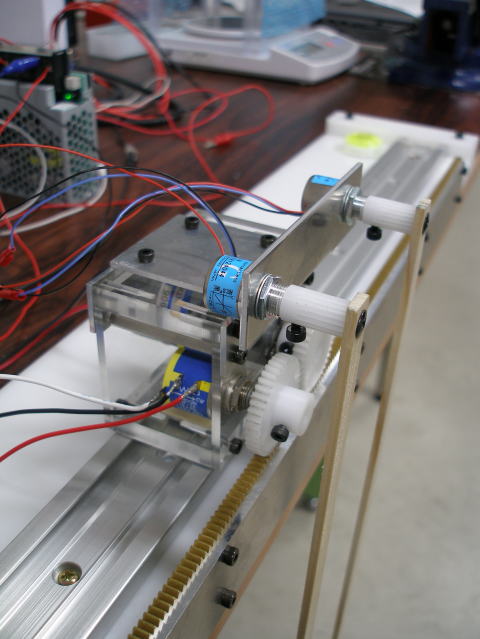
図2 並列二重倒立振子実験装置(台車部)
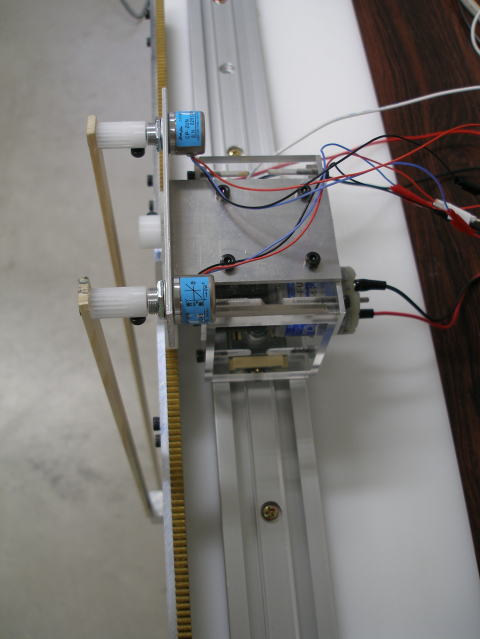
図3 並列二重倒立振子実験装置(台車部)
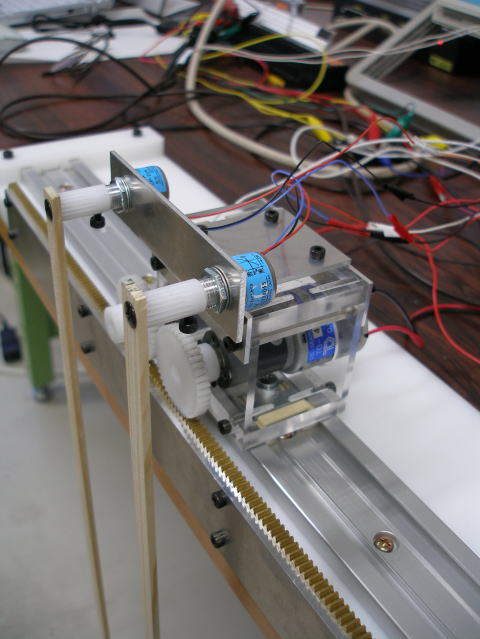
図4 並列二重倒立振子実験装置(台車部)
状態フィードバック制御による並列二重倒立振子の安定化制御実験の動画(WMVファイル) 飽和制御([1]の拡張形)によって安定化しました(台車移動幅の上限を0.4mと設定).倒立振子の安定化は,各(等価)振子長を長くすればより簡単になり,小さな出力のモータでも可能となります.さらに,並列型倒立振子の場合,良好な可制御性を得るため,各振子の長さに差をつけます.
LQや極配置法でも安定化可能と思います.
[1] K.Yoshida and I. Matsumoto, ``Stabilizing control for an inverted pendulum with restricted travel, Proceedings of the 2009 American Control Conference, pp. 543-548, 2009.