本研究室で設計製作している実験装置などを紹介します。
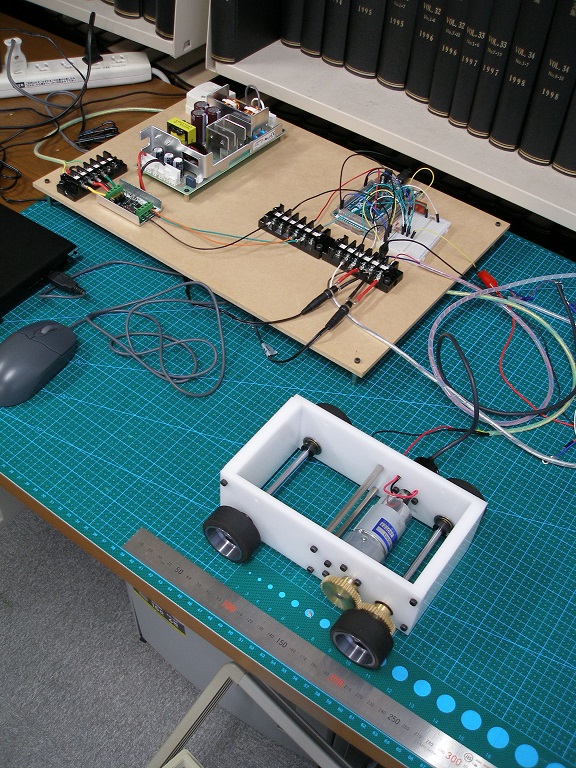
図1 台車系+Arduino Due(2018.6.4)
駆動用ギヤドDCモータ:ツカサ電工
TG-321B-SV-50-HB,24V ツカサ電工から新発売された高性能,低価格 5スロットギヤドDCモータ
モータドライバ:Dimension
Engineering SyRen 10A
台車位置検出用ロータリーエンコーダ:オムロン E6A2-CW5C 500P/R 0.5M(4逓倍で使用)
側板(板厚5mmジュラコン)は
レーザー加工機 Epilog Mini24-60Wで加工
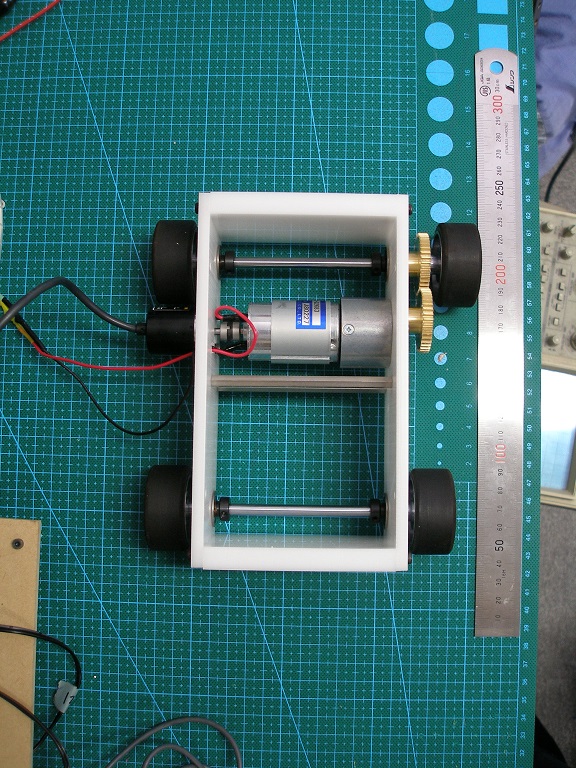
図2 台車系+Arduino Due
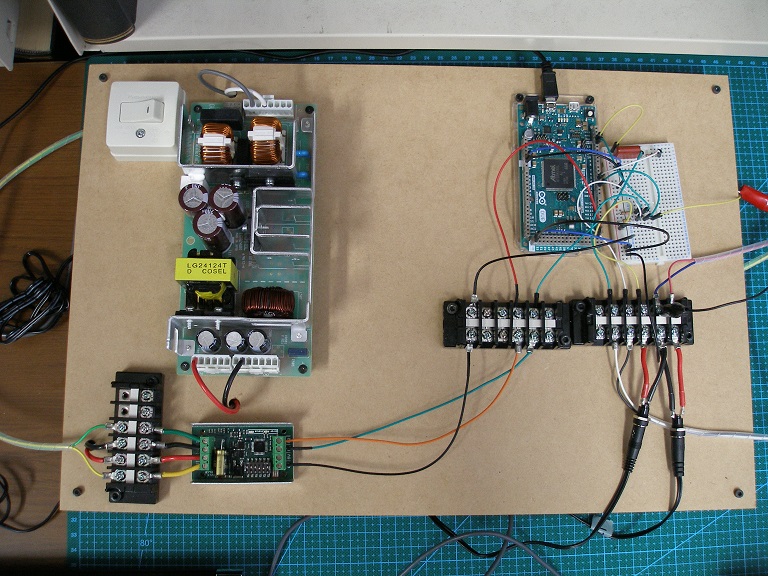
図3 台車系+Arduino Due
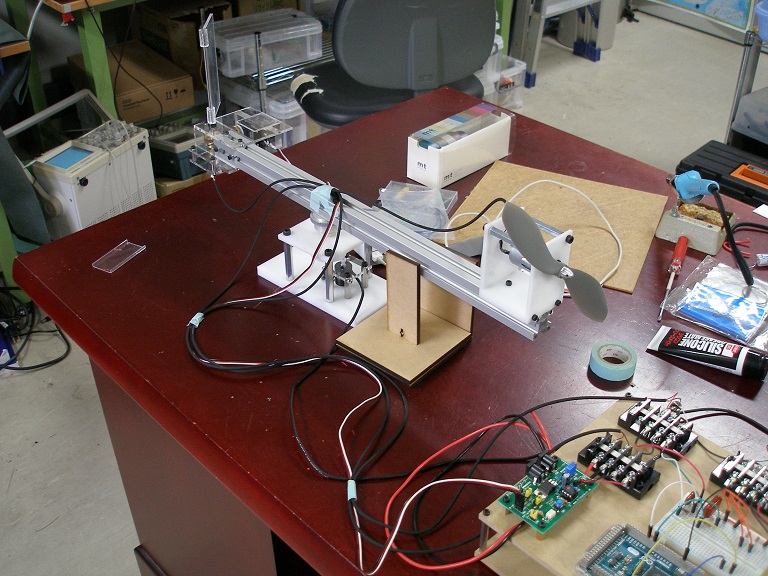
図4 舵による変針制御実験装置+Arduino Due(2018.6.6)
プロペラ:APC 10×4.7SF
プロペラ駆動用DCモータ:スリーピース TP-2732E-24
方位角計測用ロータリーエンコーダ:マイクロテックラボラトリー
MES-12-2048PC(4逓倍で使用)
操舵用アクチュエータ:アナログRCサーボ(ローテーションサーボ)GWS S35 STD,トライステート
PICアクチュエータキット
舵角計測用ポテンショメータ:アルプス電気抵抗式ポジションセンサ RDC501015A
ジュラコン板,アクリル板,シナベニヤは
レーザー加工機 Epilog Mini24-60Wで加工
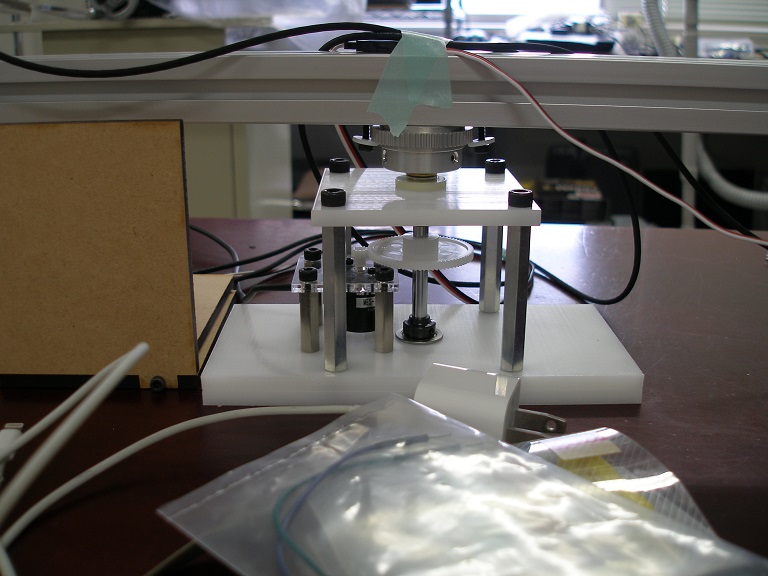
図5 舵による変針制御実験装置+Arduino Due
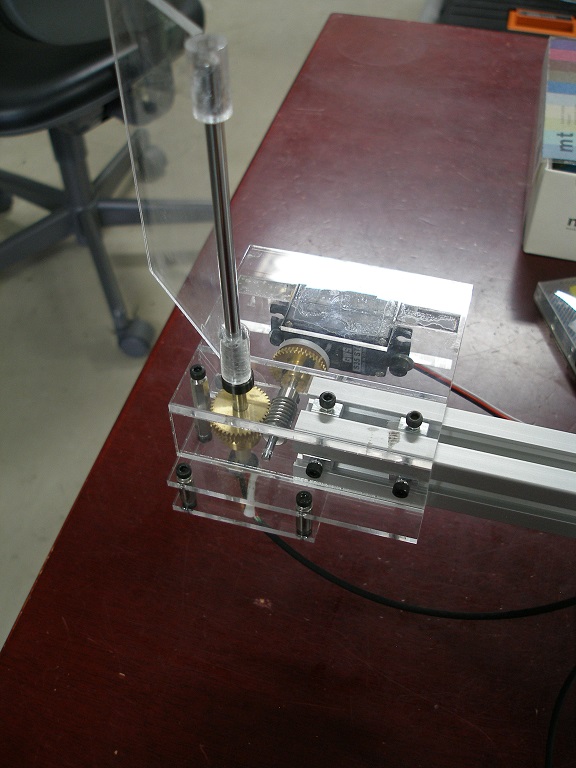
図6 舵による変針制御実験装置+Arduino Due
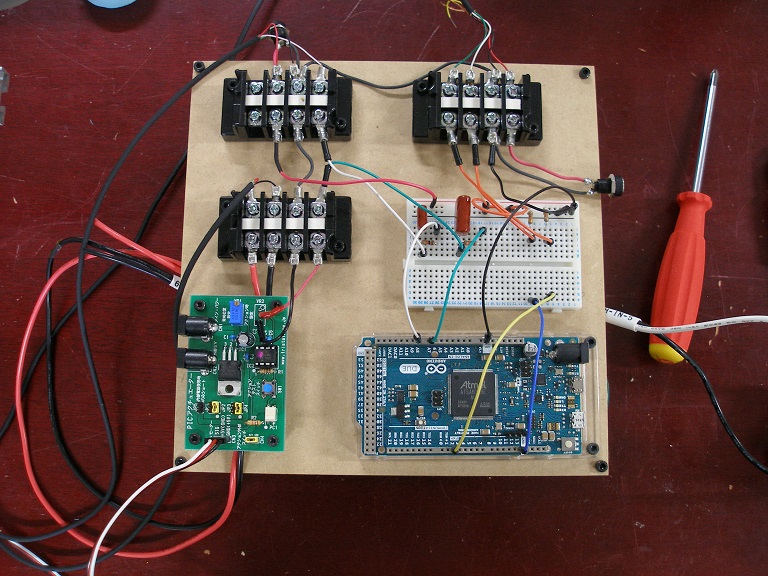
図7 舵による変針制御実験装置+Arduino Due

図8 1自由度構造系制振制御実験装置+Arduino Due(2018.6.8)
付加質量駆動用アクチュエータ:双葉電子工業 アナログRCサーボ
S3010,トライステート PICアクチュエータキット
付加質量位置計測用ポテンショメータ:アルプス電気抵抗式ポジションセンサ RDC501015A
天板加速度計測用センサー:秋月電気通商
3軸加速度センサモジュール KXR94-2050
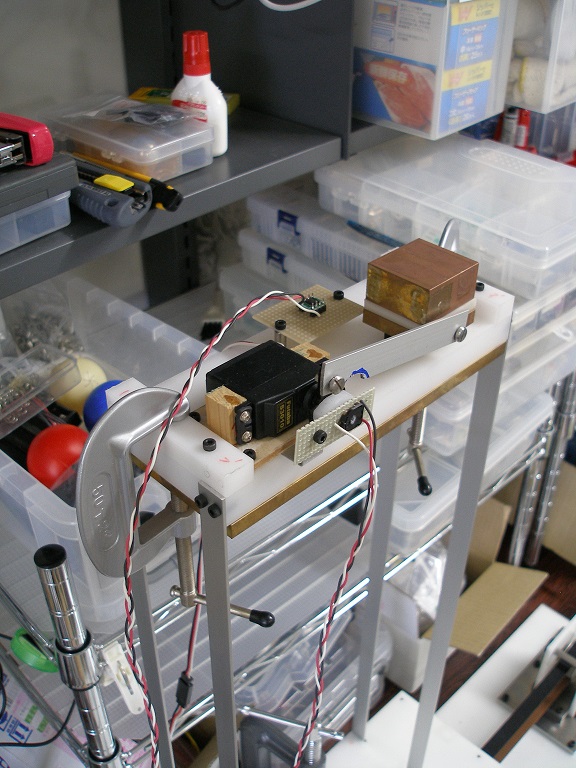
図9 1自由度構造系制振制御実験装置+Arduino Due
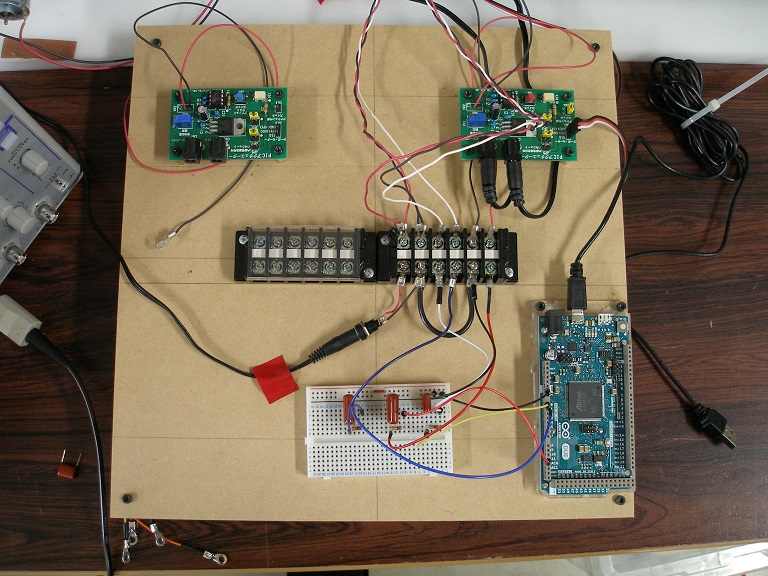
図10 1自由度構造系制振制御実験装置+Arduino Due
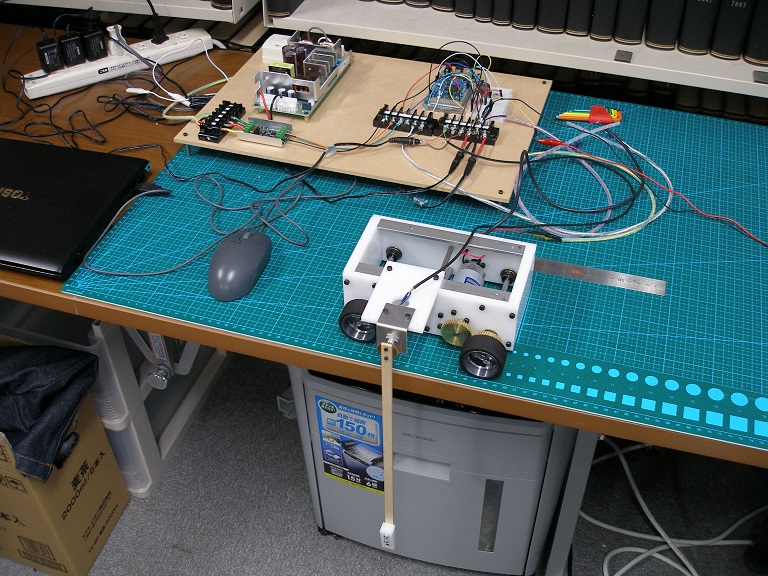
図11 クレーン系+Arduino Due(2018.6.24)
駆動用ギヤドDCモータ:ツカサ電工
TG-321B-SV-50-HB,24V
モータドライバ:Dimension
Engineering SyRen 10A
台車位置検出用ロータリーエンコーダ:オムロン E6A2-CW5C 500P/R 0.5M(4逓倍で使用)
振り子角検出用ポテンショメータ:緑測器 無接触型回転角度センサ CP-2UN
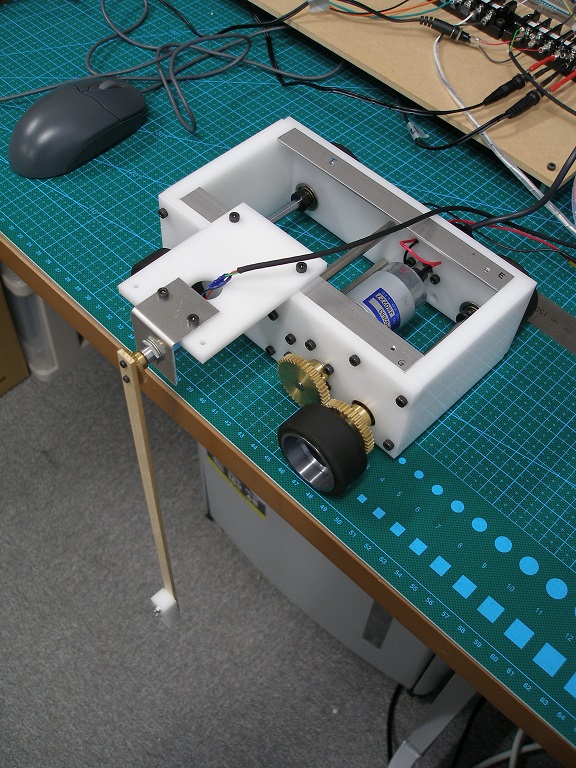
図12 クレーン系+Arduino Due
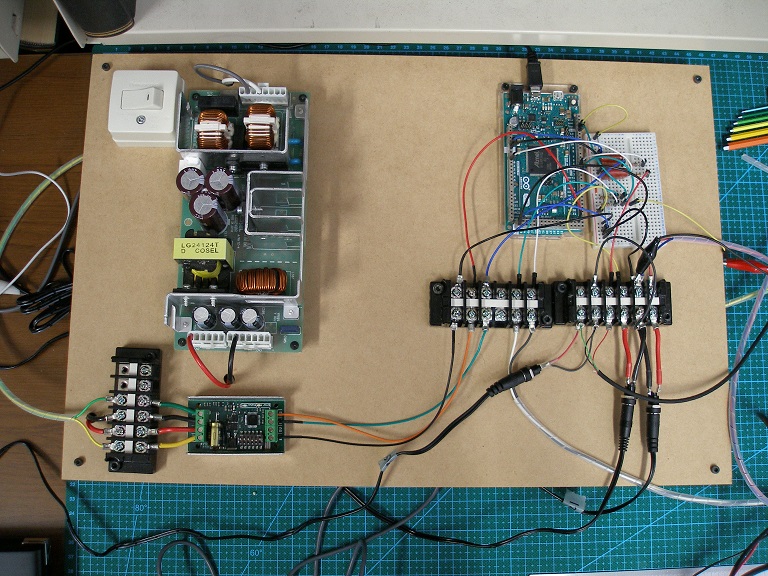
図13 クレーン系+Arduino Due
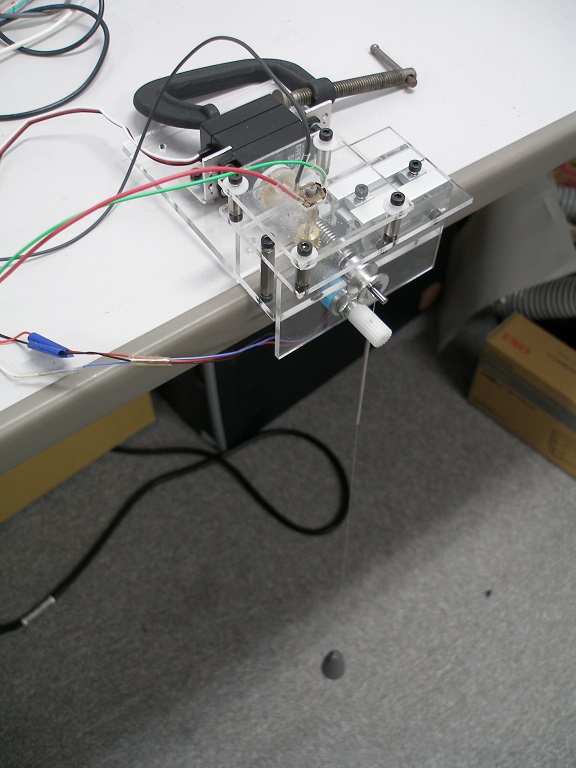
図14 クレーン系用巻き上げ機構+Arduino Due(2018.8.11) 自然科学研究科のPBL科目の一つ「実践教育プロジェクトII」(通年,2単位)の一課題として製作しました。
駆動用アクチュエータ:アナログRCサーボ(ローテーションサーボ)
GWS S35 STD,トライステート PICアクチュエータキット
ロープ長計測用ポテンショメータ:アルプス電気抵抗式ポジションセンサ RDC501015A
荷の振れ角計測用ポテンショメータ:緑測器 無接触型回転角度センサ CP-2UN
アクリル板は
レーザー加工機 Epilog Mini24-60Wで加工
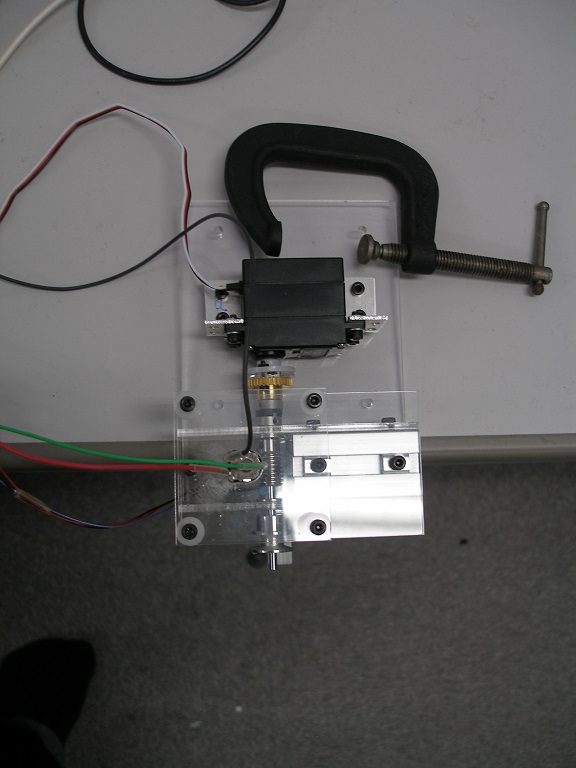
図15 クレーン系用巻き上げ機構+Arduino Due
図16 クレーン系用巻き上げ機構+Arduino Due
図17 倒立振子系+Arduino Due(2018.8.24)
駆動用ギヤドDCモータ:ツカサ電工
TG-321B-SV-50-HB,24V
モータドライバ:Dimension
Engineering SyRen 10A
台車位置検出用ロータリーエンコーダ:オムロン E6A2-CW5C 500P/R 0.5M(4逓倍で使用)
振り子角検出用ポテンショメータ:緑測器 無接触型回転角度センサ CP-2UN
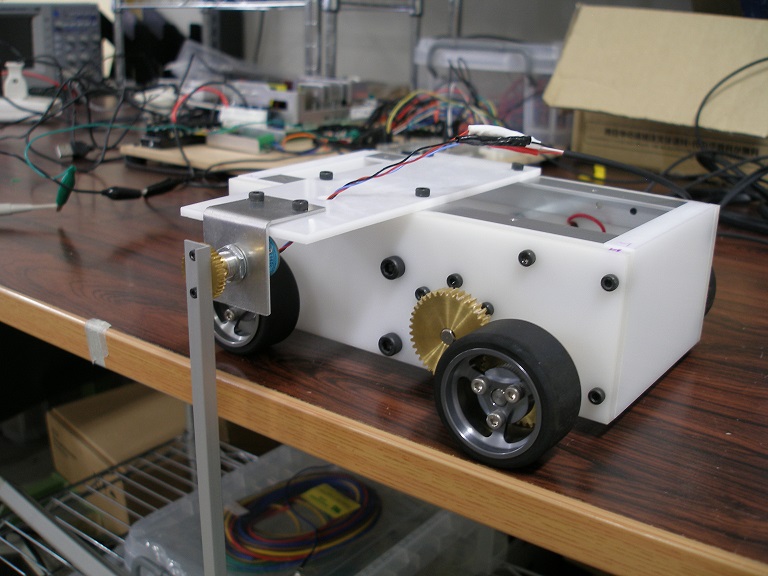
図18 倒立振子系+Arduino Due
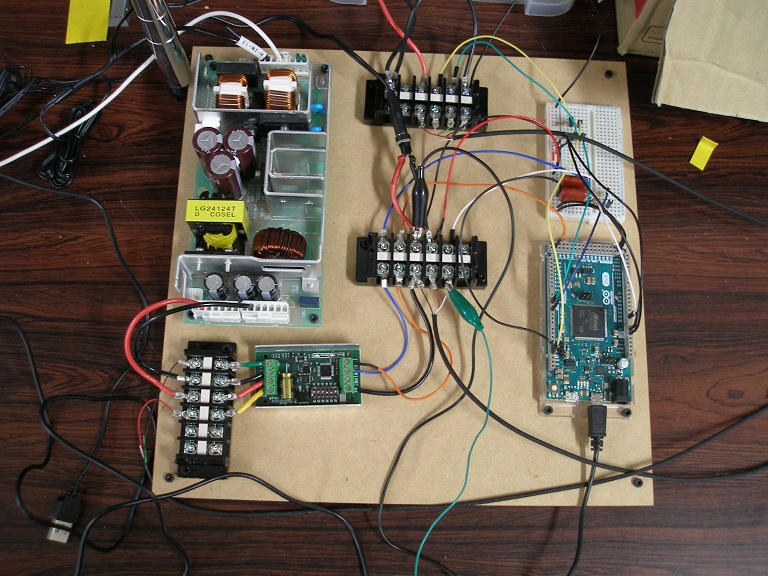
図19 倒立振子系+Arduino Due
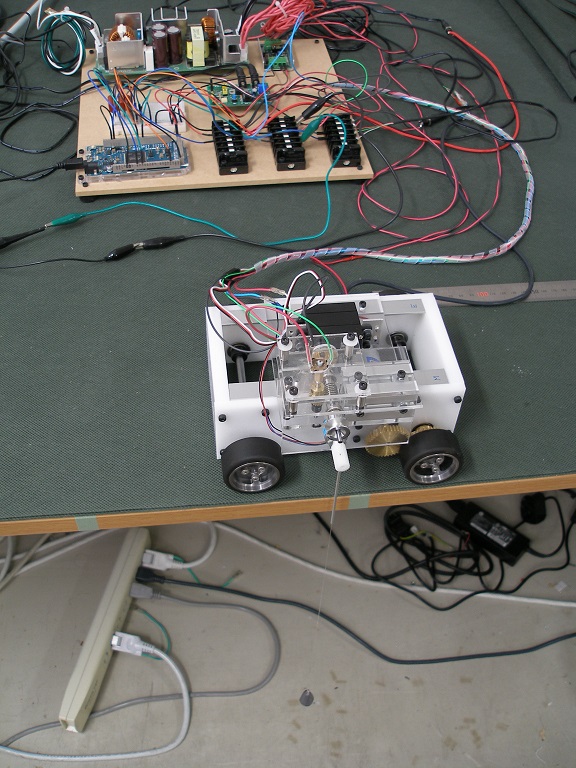
図20 クレーン系+Arduino Due(2018.9.1) 自然科学研究科のPBL科目の一つ「実践教育プロジェクトII」(通年,2単位)の一課題として製作しました。
台車部
アクチュエータ:ツカサ電工
ギヤドDCモータ TG-321B-SV-50-HB,24V
モータドライバ:Dimension
Engineering SyRen 10A
台車位置検出用ロータリーエンコーダ:オムロン E6A2-CW5C 500P/R 0.5M(4逓倍で使用)
振子部
アクチュエータ:アナログRCサーボ(ローテーションサーボ)
GWS S35 STD,トライステート PICアクチュエータキット
ロープ長計測用ポテンショメータ:アルプス電気抵抗式ポジションセンサ RDC501015A
荷の振れ角計測用ポテンショメータ:緑測器 無接触型回転角度センサ CP-2UN
ジュラコン板,アクリル板はレーザー加工機 Epilog Mini24-60Wで加工
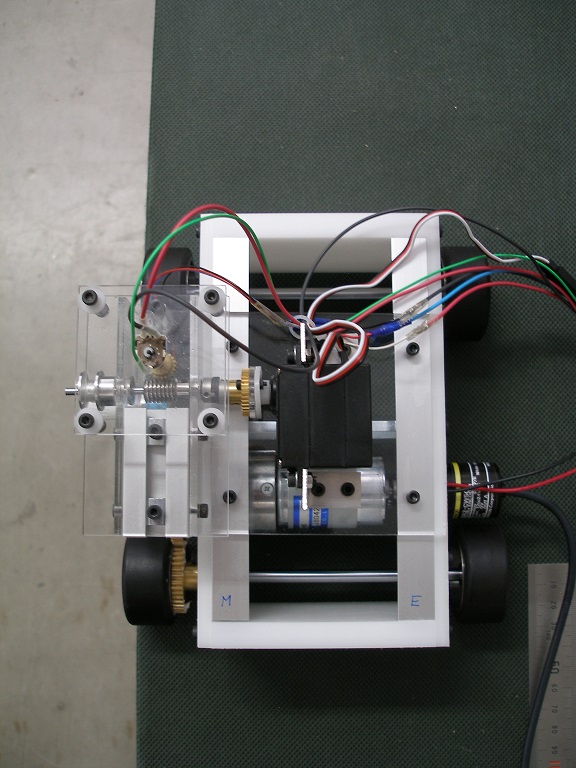
図21 クレーン系+Arduino Due
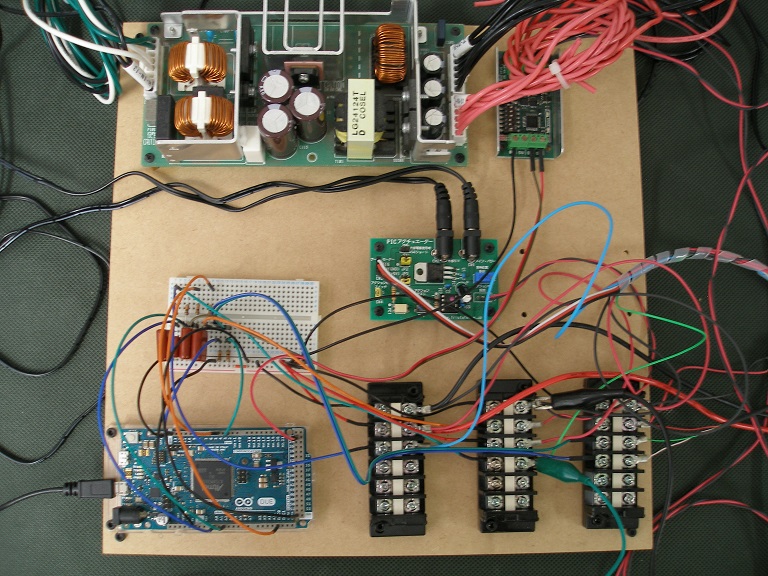
図22 クレーン系+Arduino Due
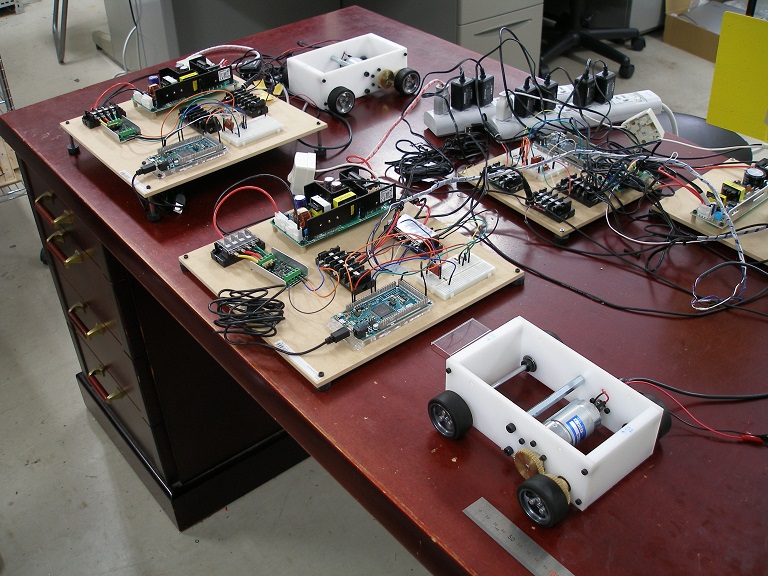
図23 台車系(学生実験III テーマ「むだ時間系に対するIMC制御系の設計」で使用)+Arduino Due(2018.9.13)
アクチュエータ:ツカサ電工
ギヤドDCモータ TG-321B-SV-50-HB,24V
モータドライバ:Dimension
Engineering SyRen 10A
台車位置検出用ロータリーエンコーダ:オムロン E6A2-CW5C 500P/R 0.5M(4逓倍で使用)
モータドライバ用電源:TDK-Lambda
ZWS150BAF-24
ロータリーエンコーダ用電源:ユニファイブ ACアダプター UN110-1210-PL03B
オープンコレクタ回路用電源:ユニファイブ ACアダプター UN110-3320-EIAJ-2
ジュラコン板はレーザー加工機 Epilog
Mini24-60Wで加工
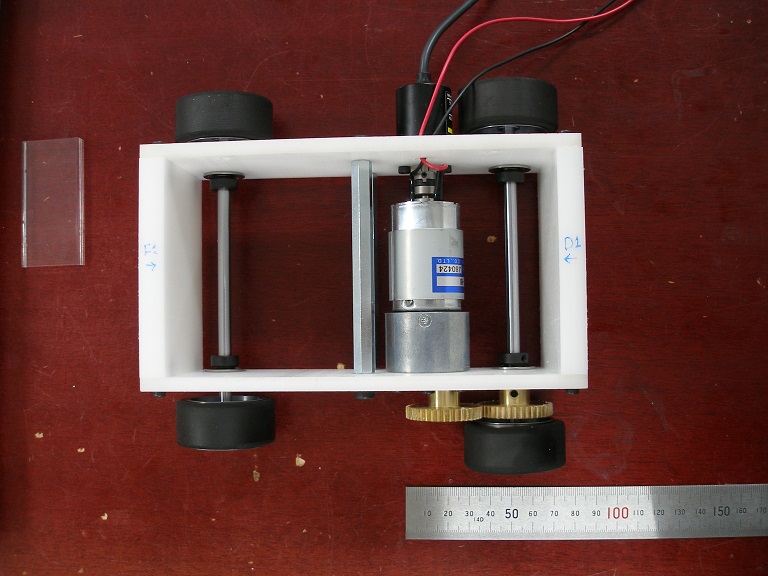
図24 台車系+Arduino Due
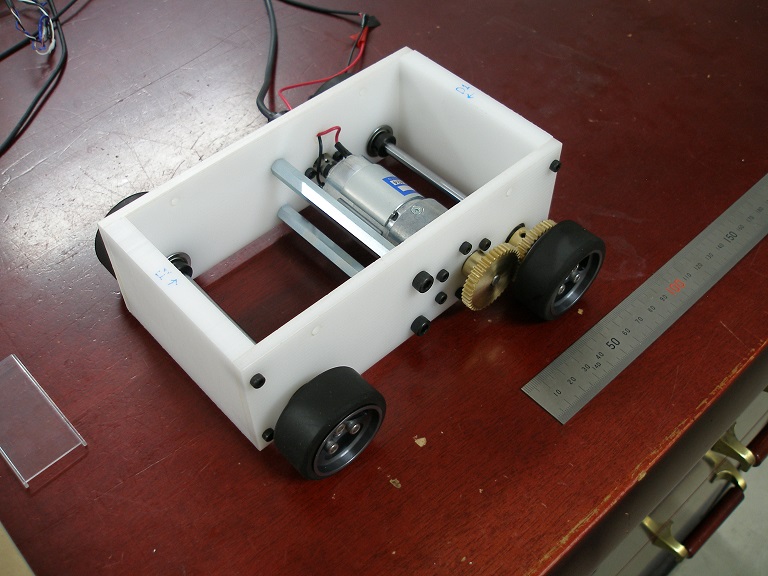
図25 台車系+Arduino Due
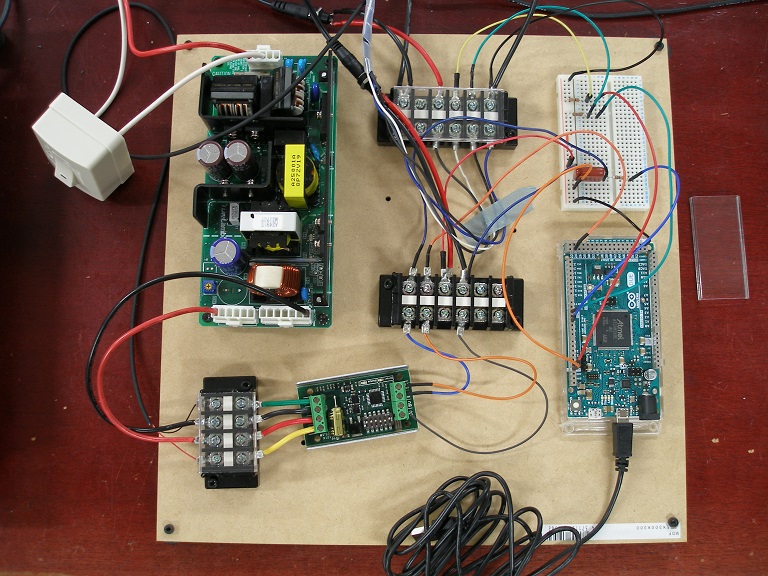
図26 台車系+Arduino Due
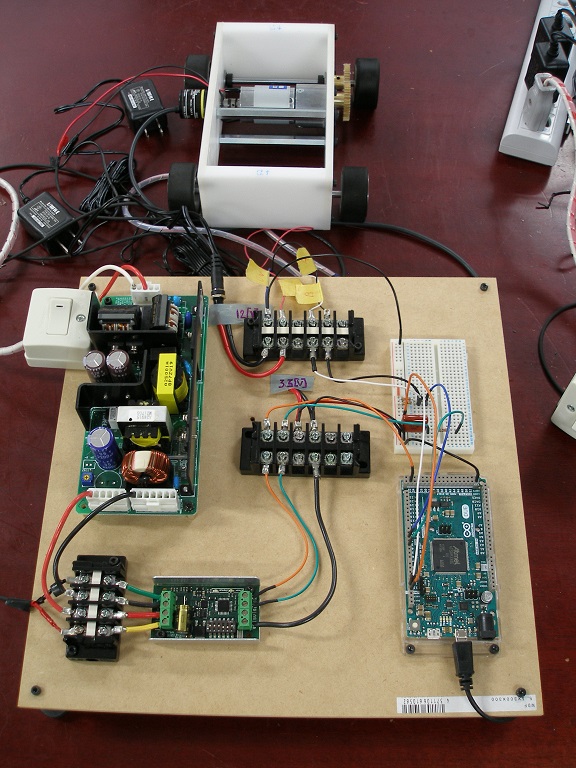
図27 台車系+Arduino Due
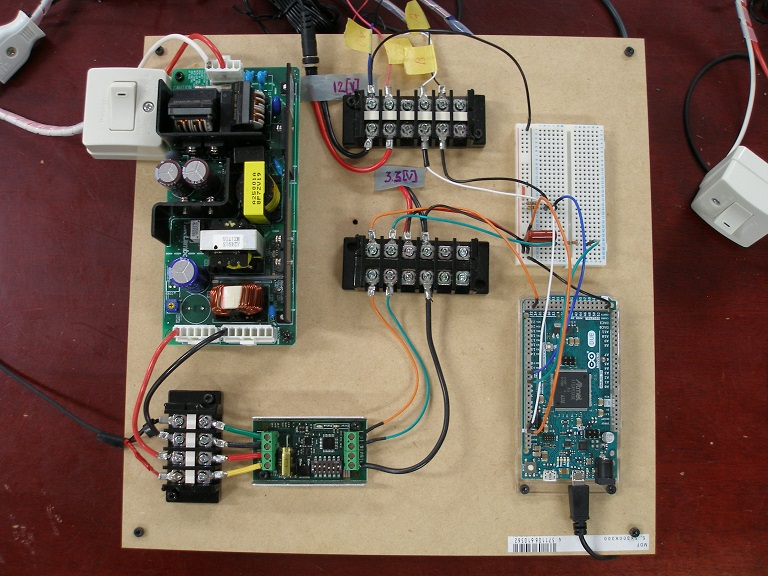
図28 台車系+Arduino Due
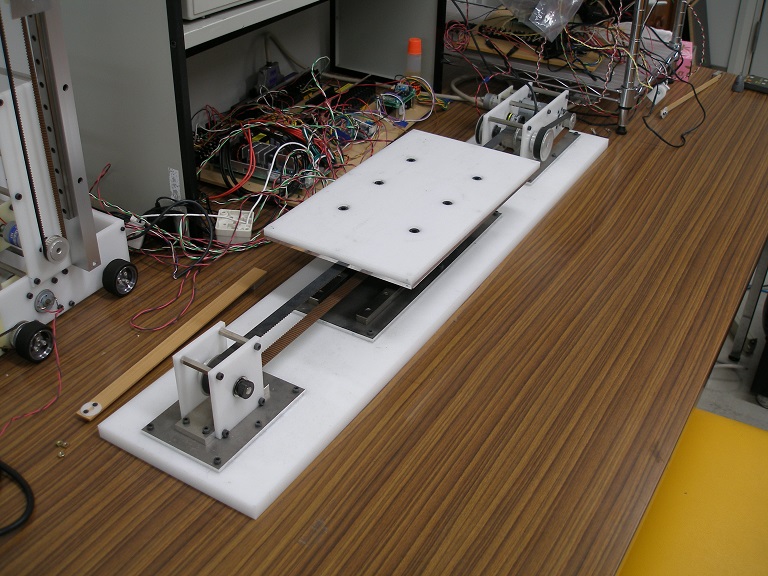
図29 振動台再生プロジェクトその2(2018.9.21)
古くなった振動台を再生するプロジェクトを開始しました。駆動部を再設計し,タイミングベルト類を交換する予定です。
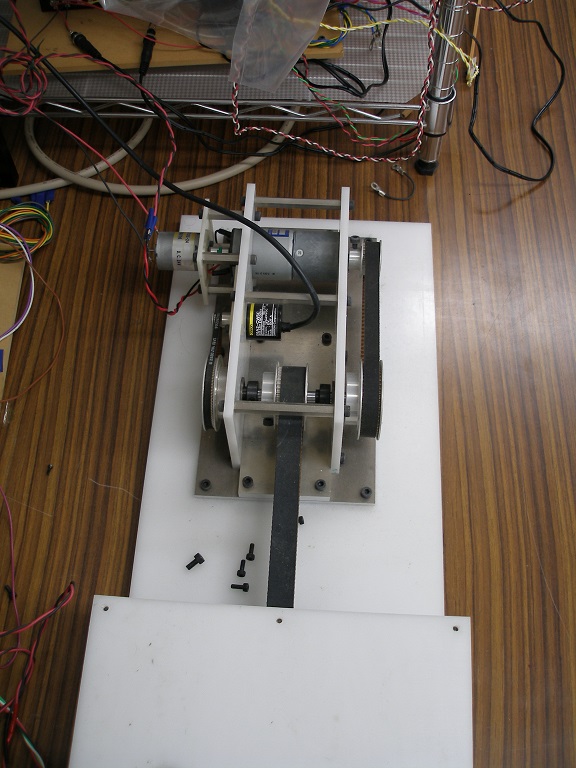
図30 振動台再生プロジェクトその2

図31 振動台再生プロジェクトその2
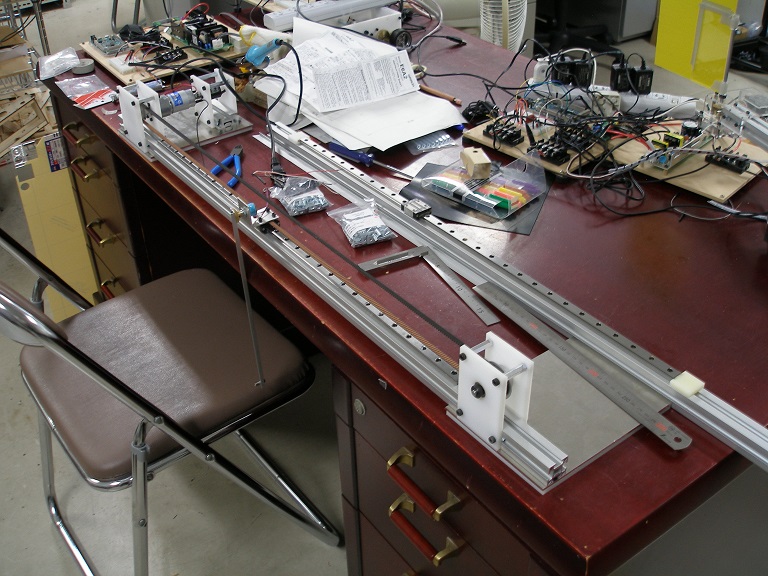
図32 エレベータ系製作中(2018.9.28)
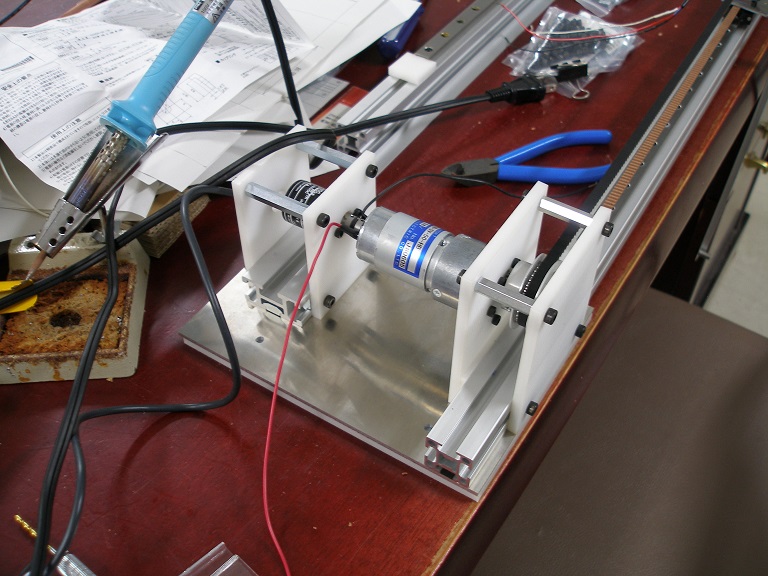
図33 エレベータ系製作中

図34 エレベータ系製作中
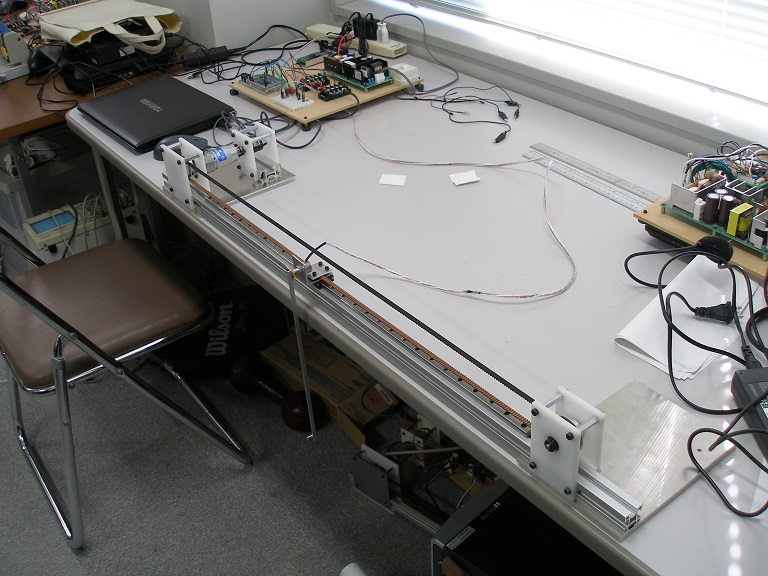
図35 エレベータ系製作中(2018.10.3)(倒立振子系として駆動部をテスト)
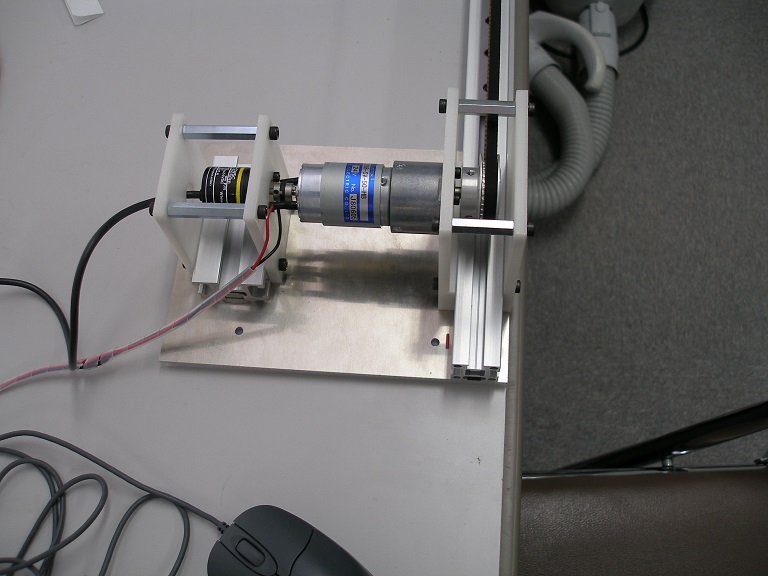
図36 エレベータ系製作中
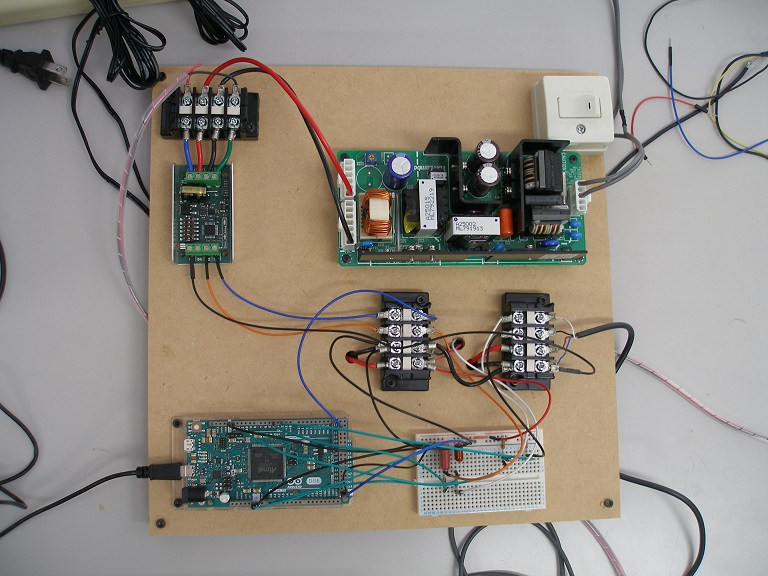
図37 エレベータ系製作中

図38 エレベータ系製作中(2018.10.5)(レコフレームを組み立て,駆動部と回路系をセット)
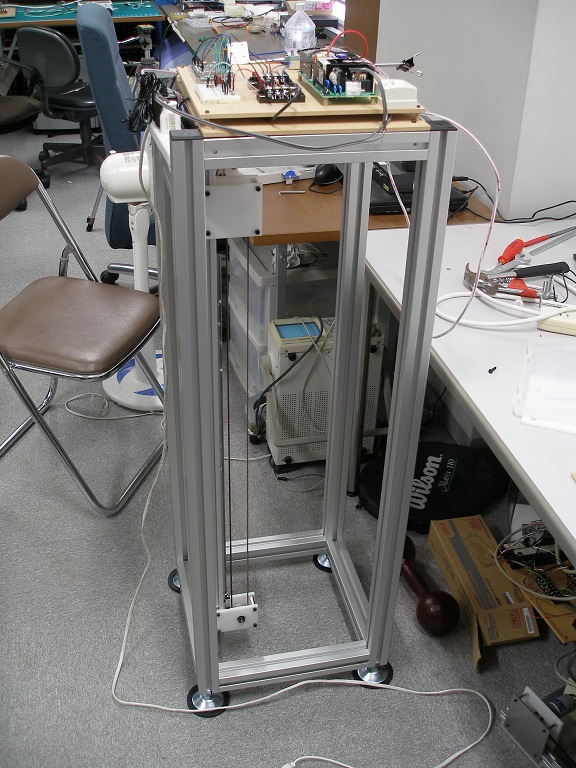
図39 エレベータ系製作中
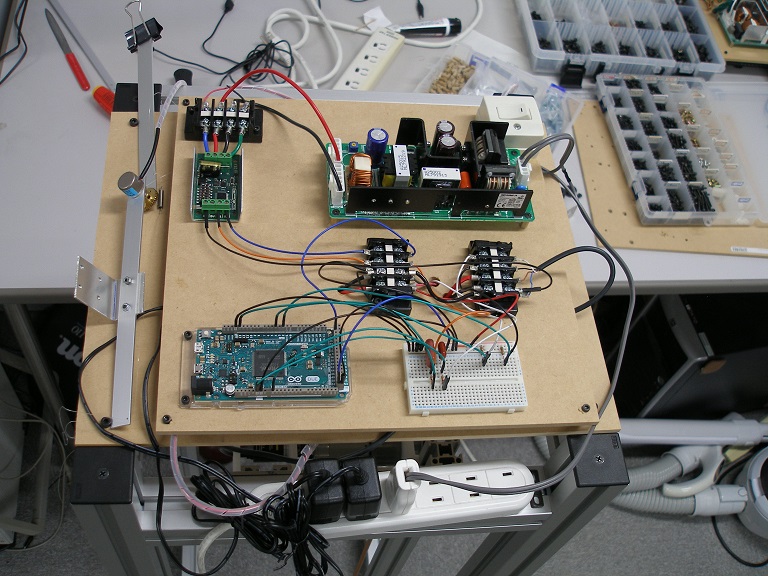
図40 エレベータ系製作中
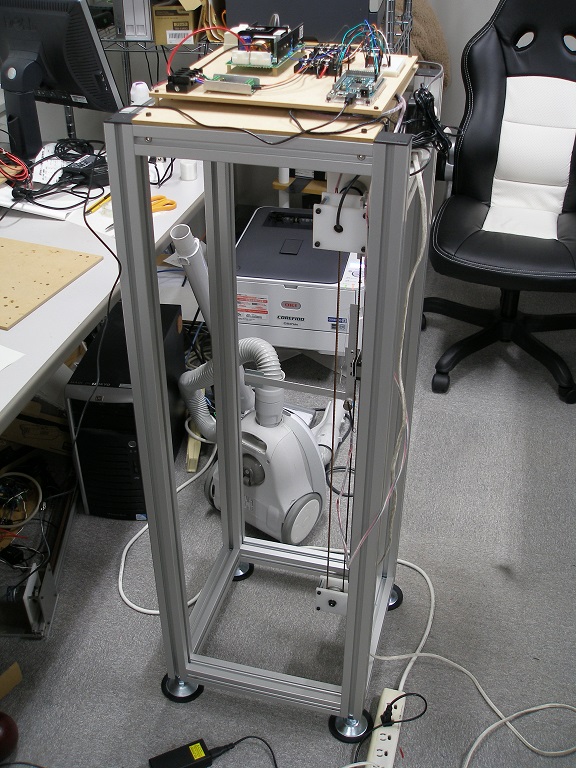
図41 エレベータ系+Arduino Due(2018.10.10)
アクチュエータ:ツカサ電工
ギヤドDCモータ TG-321B-SV-50-HB,24V
モータドライバ:Dimension
Engineering SyRen 10A
かご位置検出用ロータリーエンコーダ:オムロン E6A2-CW5C 500P/R 0.5M(4逓倍で使用)
かご部の振り子角検出用ポテンショメータ:緑測器 無接触型回転角度センサ CP-2UN
モータドライバ用電源:TDK-Lambda
ZWS150BAF-24
ロータリーエンコーダ用電源:ユニファイブ ACアダプター UN110-1210-PL03B
オープンコレクタ回路とポテンショメータ用電源:ユニファイブ ACアダプター UN110-3320-EIAJ-2
ジュラコン板はレーザー加工機 Epilog
Mini24-60Wで加工

図42 エレベータ系+Arduino Due
図43 エレベータ系+Arduino Due
図44 門型クレーン系製作中(2018.11.2)

図45 門型クレーン系製作中

図46 門型クレーン系製作中(2018.11.3)
図47 門型クレーン系製作中
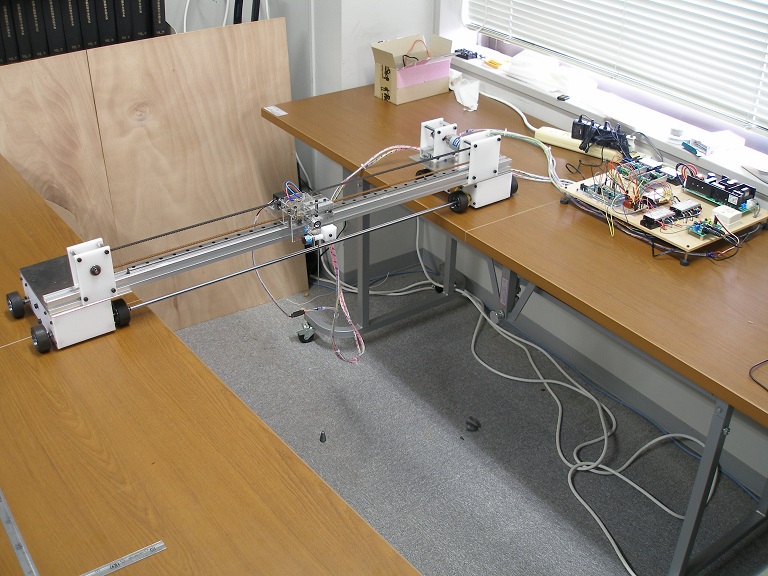
図48 門型クレーン系+Arduino Due(2018.11.30)
アクチュエータ(前後,横):ツカサ電工 ギヤドDCモータ TG-321B-SV-50-HB,24V
モータドライバ:Dimension
Engineering SyRen 10A
トロリ位置検出用ロータリーエンコーダ:オムロン E6A2-CW5C 500P/R 0.5M(4逓倍で使用)
モータドライバ用電源:TDK-Lambda
ZWS150BAF-24
アクチュエータ(巻き上げ部):アナログRCサーボ(ローテーションサーボ)
GWS S35 STD,トライステート PICアクチュエータキット
ロープ長計測用ポテンショメータ:アルプス電気抵抗式ポジションセンサ RDC501015A
荷の振れ角計測用ポテンショメータ:緑測器 無接触型回転角度センサ CP-2UN
ロータリーエンコーダとPICアクチュエータ用電源:ユニファイブ
ACアダプター UN110-1210-PL03B
オープンコレクタ回路とポテンショメータ用電源:ユニファイブ ACアダプター UN110-3320-EIAJ-2
アナログRCサーボ用電源:ユニファイブ
ACアダプター UN110-0520-PL03B
ジュラコン板,アクリル板,シナベニヤはレーザー加工機 Epilog
Mini24-60Wで加工
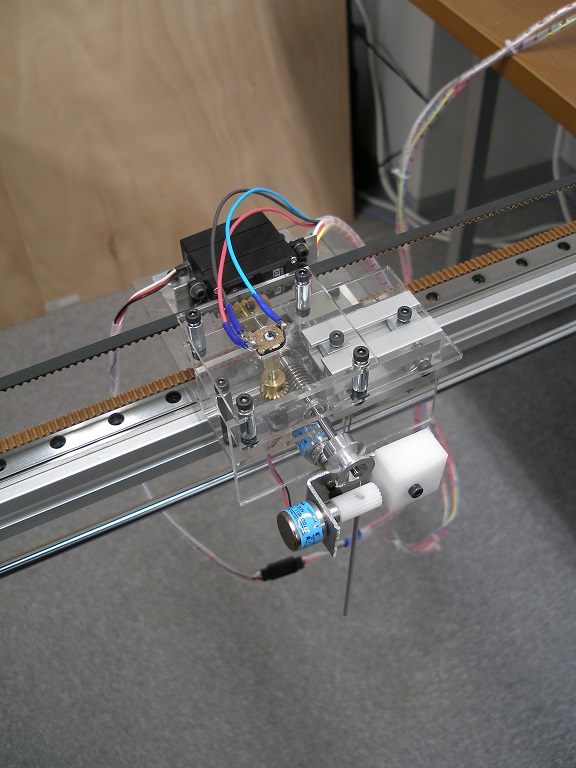
図49 門型クレーン系+Arduino Due
図50 門型クレーン系+Arduino Due
図51 タワー型クレーン系(製作中)(2018.12.16)
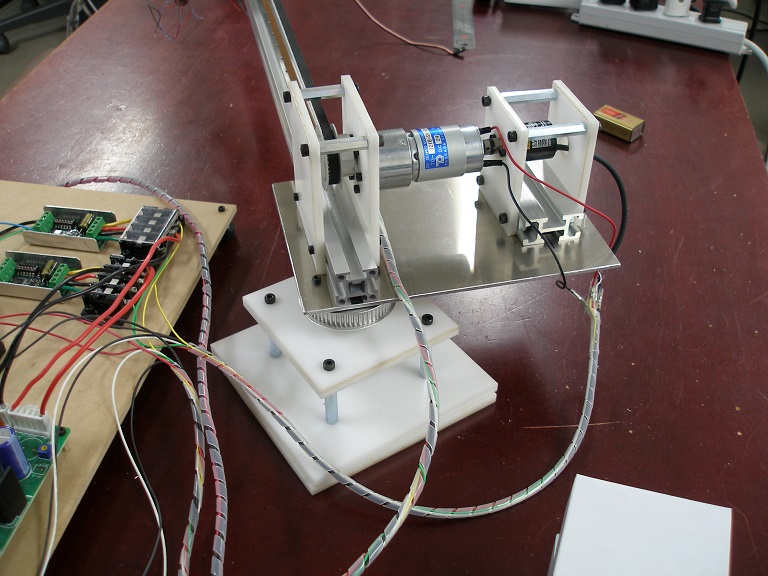
図52 タワー型クレーン系(製作中)
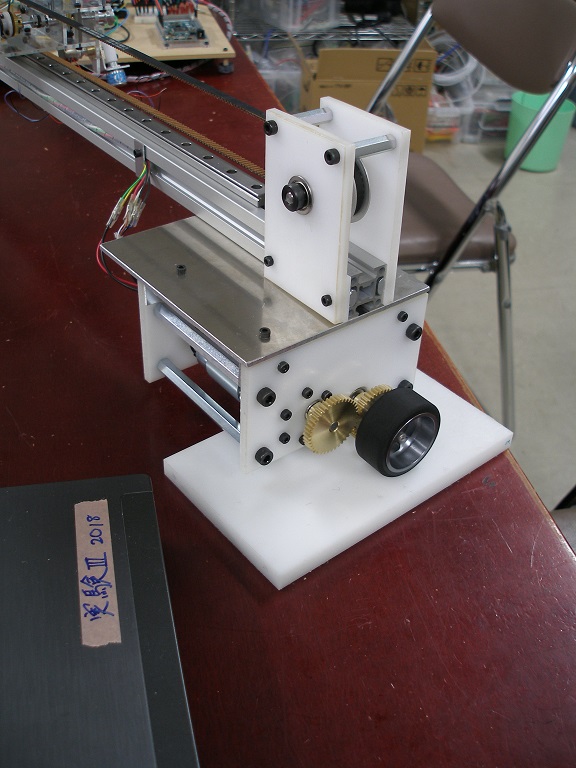
図53 タワー型クレーン系(製作中)
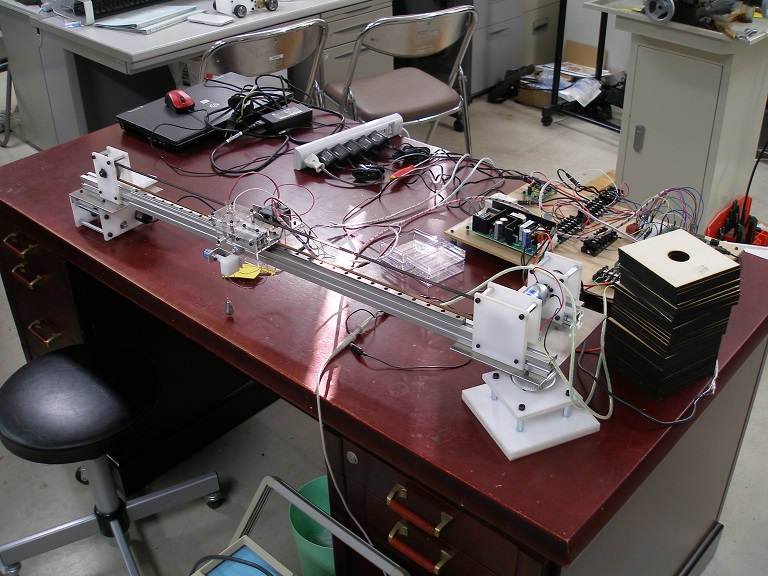
図54 タワー型クレーン系(製作中)(2019.1.4)
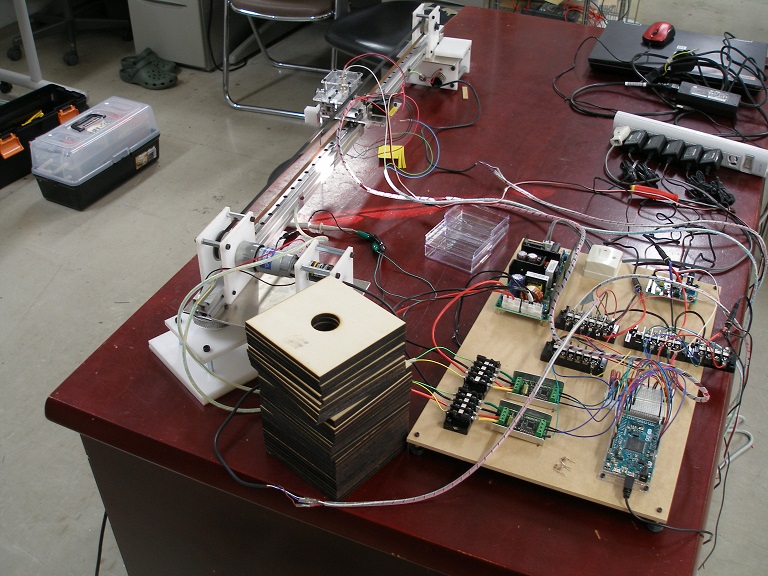
図55 タワー型クレーン系(製作中)

図56 タワー型クレーン系(製作中)

図57 タワー型クレーン系+Arduino Due(2019.1.9)
アクチュエータ(ラジアル,回転):ツカサ電工 ギヤドDCモータ TG-321B-SV-50-HB,24V
モータドライバ:Dimension
Engineering SyRen 10A
トロリ位置検出用ロータリーエンコーダ:オムロン E6A2-CW5C 500P/R 0.5M(4逓倍で使用)
モータドライバ用電源:TDK-Lambda
ZWS150BAF-24
アクチュエータ(巻き上げ部):アナログRCサーボ(ローテーションサーボ)
GWS S35 STD,トライステート PICアクチュエータキット
ロープ長計測用ポテンショメータ:アルプス電気抵抗式ポジションセンサ RDC501015A
荷の振れ角計測用ポテンショメータ:緑測器 無接触型回転角度センサ CP-2UN
ロータリーエンコーダとPICアクチュエータ用電源:ユニファイブ
ACアダプター UN110-1210-PL03B
オープンコレクタ回路とポテンショメータ用電源:ユニファイブ ACアダプター UN110-3320-EIAJ-2
アナログRCサーボ用電源:ユニファイブ
ACアダプター UN110-0520-PL03B
ジュラコン板,アクリル板,シナベニヤはレーザー加工機 Epilog
Mini24-60Wで加工
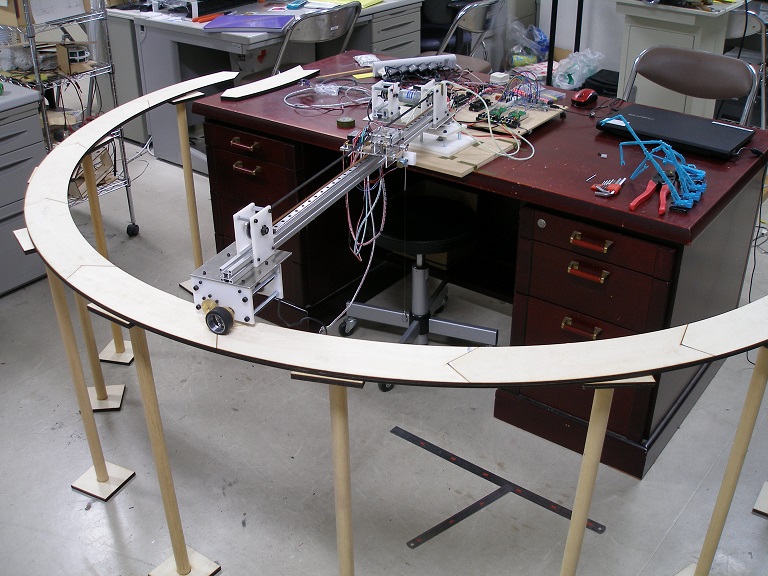
図58 タワー型クレーン系+Arduino Due(2019.1.31)

図59 タワー型クレーン系+Arduino Due