本研究室で設計製作している実験装置などを紹介します。
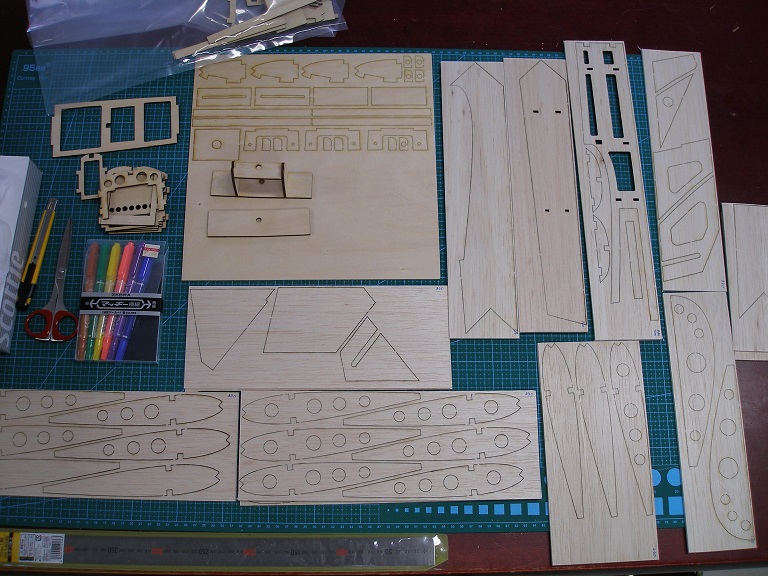
図1 RCプレーンレーザーカットキット(2017.6.7)
PILOTから販売されていたCombo25 TOMAHAWKをベースに電動仕様(15クラス,例えば,OSモーター
OMA-3815-1000-W)として設計しました。
全長1000mm,全幅1420mm,2車輪式
使用したCADソフトとレーザー加工機:RootRro CAD 8 Professonal,EPILOG LASER Zing16-30
図面
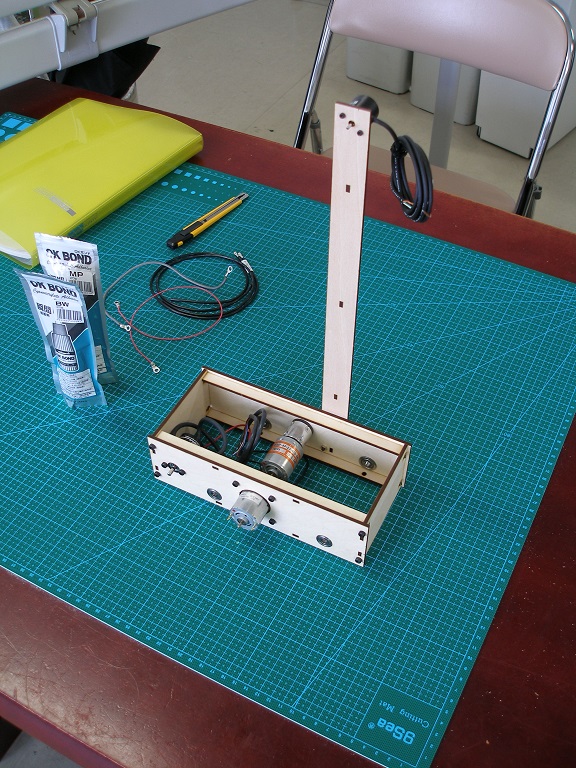
図2 倒立振子実験装置レーザーカットキット(2017.7.15)
駆動用ギヤドDCモータ:スリーピース TP-2732F-KP-23-S1-24,モータドライバ:スリーピース
TPDR-58A,DCタコジェネレータの代用品:
スリーピース TP-2732E-24,ロータリーエンコーダ:オムロン E6A2-CW5C 500P/R
0.5M(4逓倍で使用)
振り子角変位検出用ロータリーエンコーダ:マイクロテックラボラトリー
MES-12-2048PC(4逓倍で使用)
材料:3mmシナベニヤ
使用したCADソフトとレーザー加工機:RootRro CAD 8
Professonal,EPILOG LASER Zing16-30
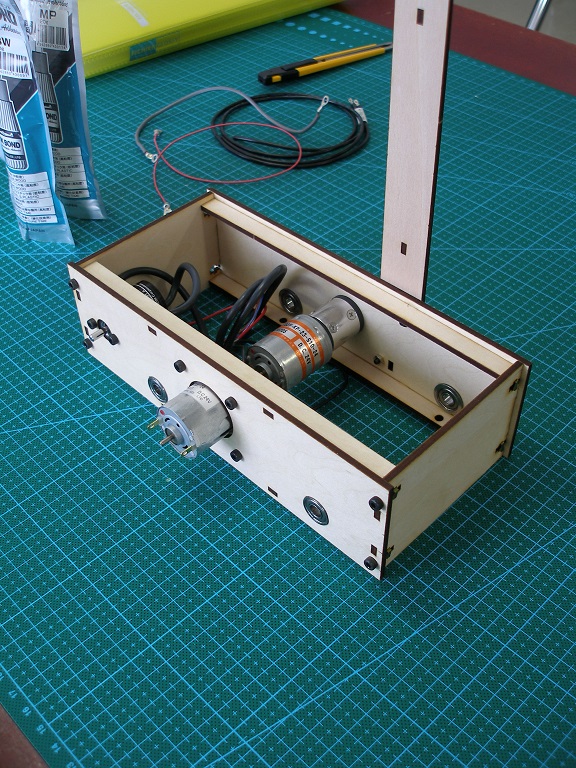
図3 倒立振子実験装置レーザーカットキット
各パーツは図面通り正確にレーザーカットされ,DCモータシャフトとタコジェネレータシャフトのミスアラインメントもありません。
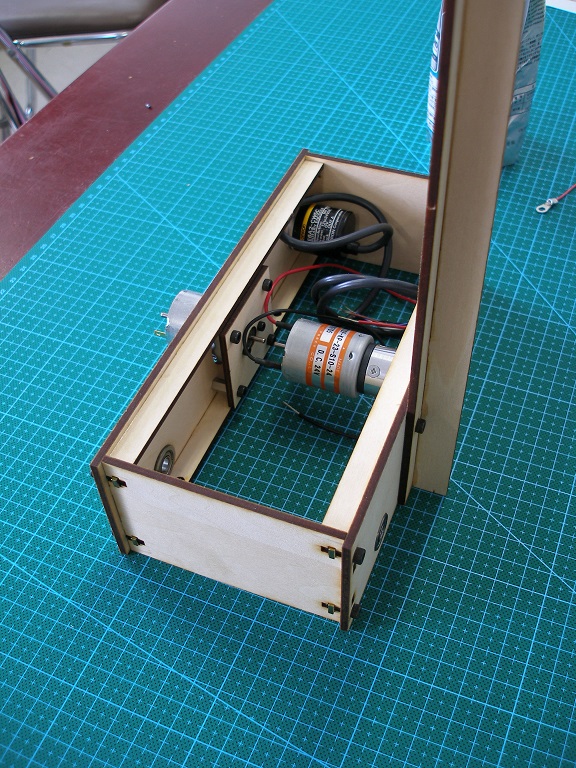
図4 倒立振子実験装置レーザーカットキット
シャーシはM3ねじと四角ナットで組み立てられ,分解もできます。
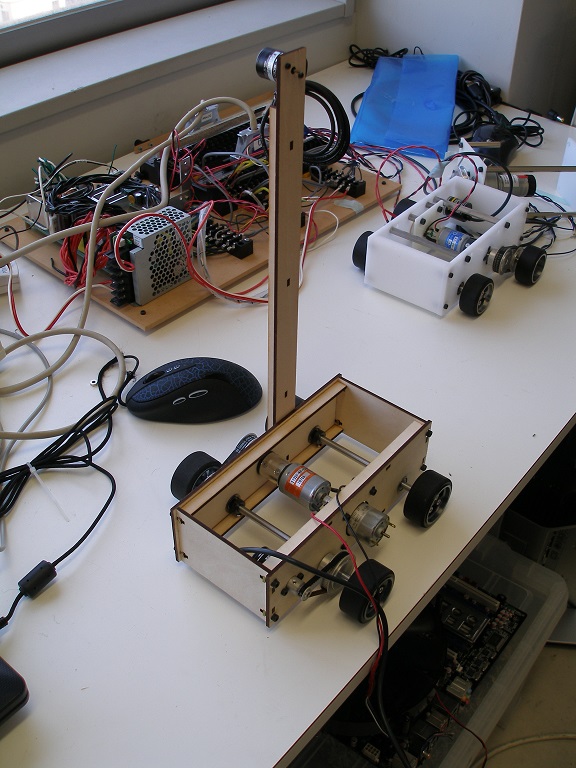
図5 倒立振子実験装置レーザーカットキット(2017.8.3)
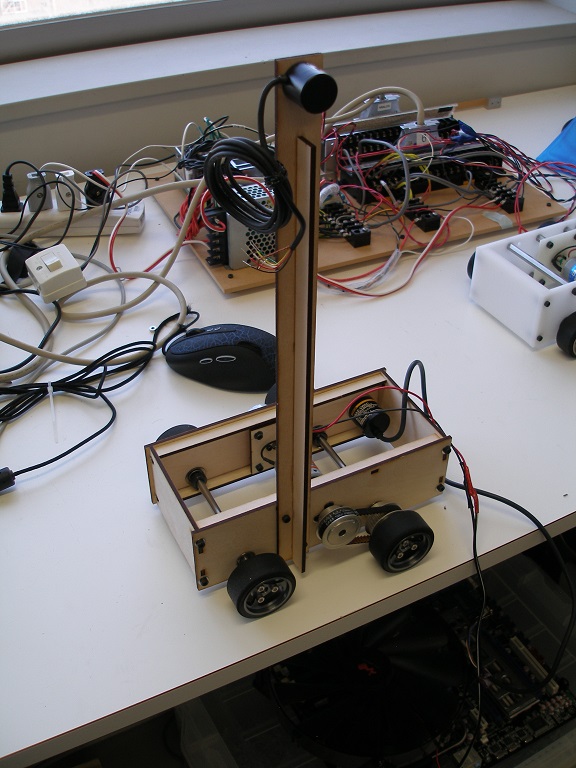
図6 倒立振子実験装置レーザーカットキット
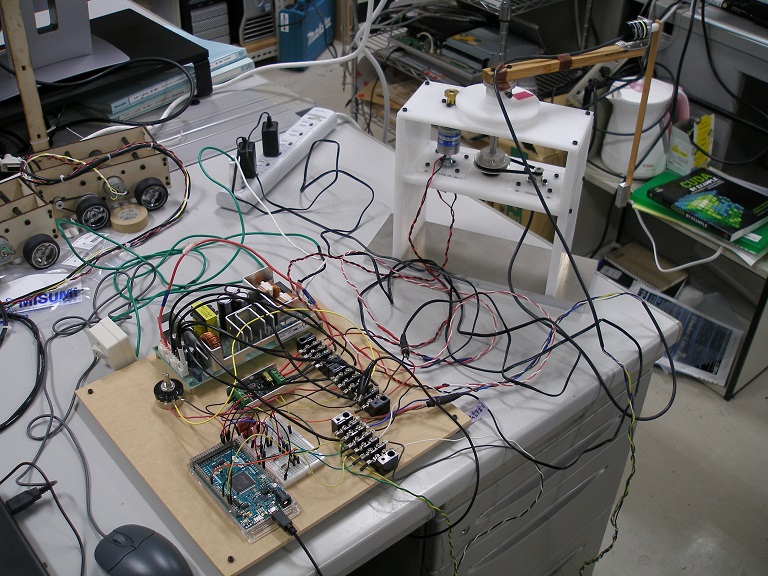
図7 倒立振子実験装置+Arduino Due(2018.1.4)
駆動用ギヤドDCモータ:ツカサ電工 TG-47G-FU-23-KB, 24V,モータドライバ:Dimension
Engineering SyRen 10A,
DCタコジェネレータの代用品:スリーピース TP-2732E-24,ロータリーエンコーダ:オムロン E6A2-CW5C 500P/R
0.5M(4逓倍で使用)
振り子角変位検出用ロータリーエンコーダ:オムロン E6A2-CW5C 500P/R 0.5M(4逓倍で使用)
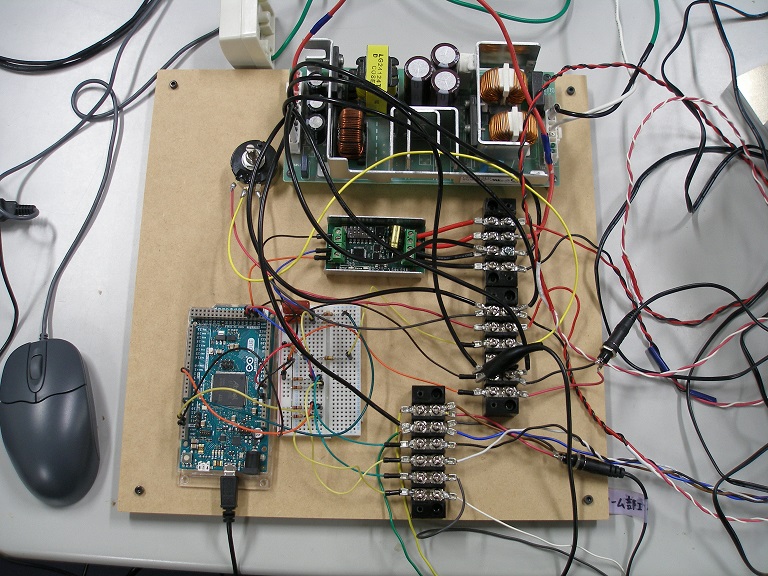
図8 倒立振子実験装置+Arduino Due
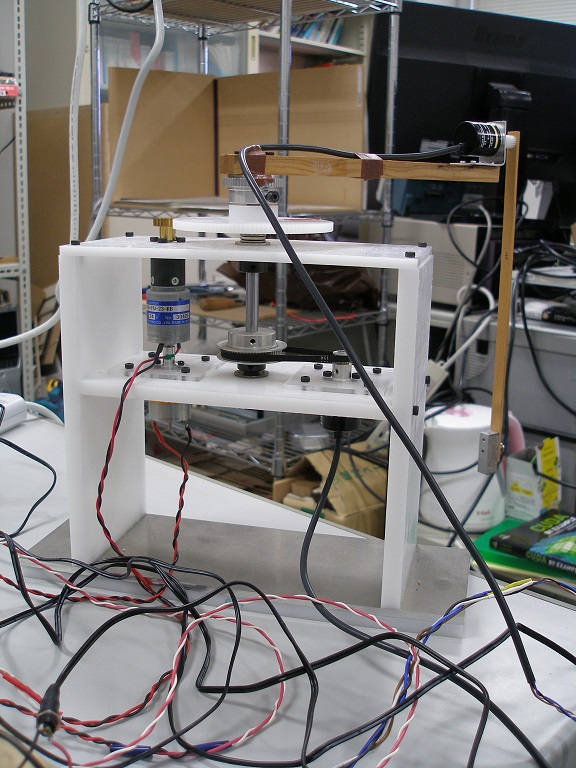
図9 倒立振子実験装置+Arduino Due
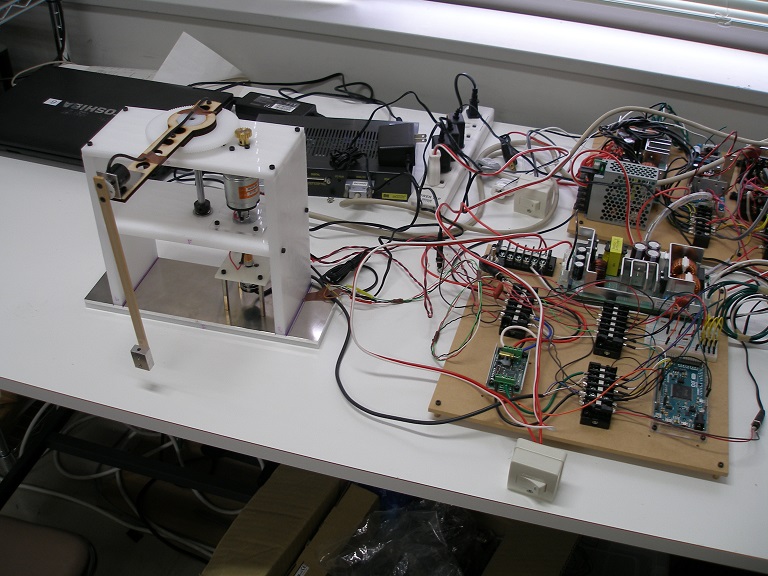
図10 倒立振子実験装置+Arduino Due(2017.12.7)
駆動用ギヤドDCモータ:スリーピース TP-3640C-KM-18-S10-24,モータドライバ:Dimension
Engineering SyRen 10A,
DCタコジェネレータの代用品:スリーピース TP-2732E-24,ロータリーエンコーダ:オムロン E6A2-CW5C 500P/R
0.5M(4逓倍で使用)
振り子角変位検出用ロータリーエンコーダ:マイクロテックラボラトリー MES-12-2048PC(4逓倍で使用)
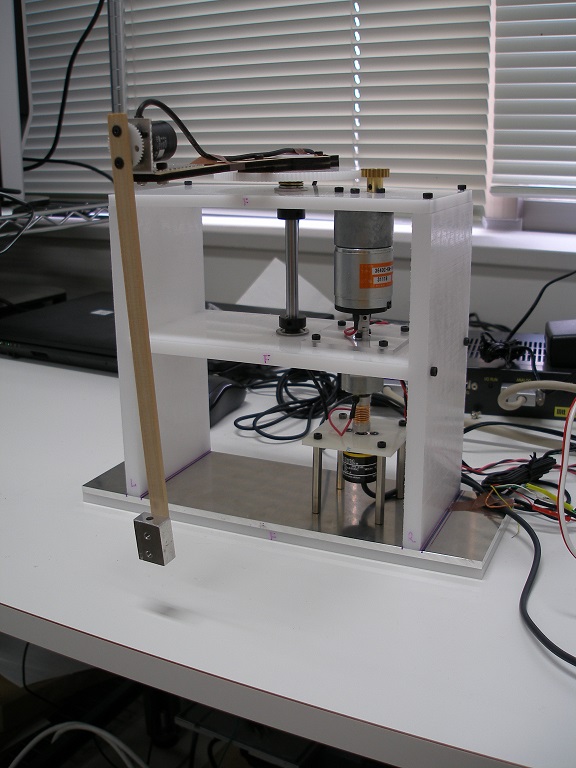
図11 倒立振子実験装置+Arduino Due
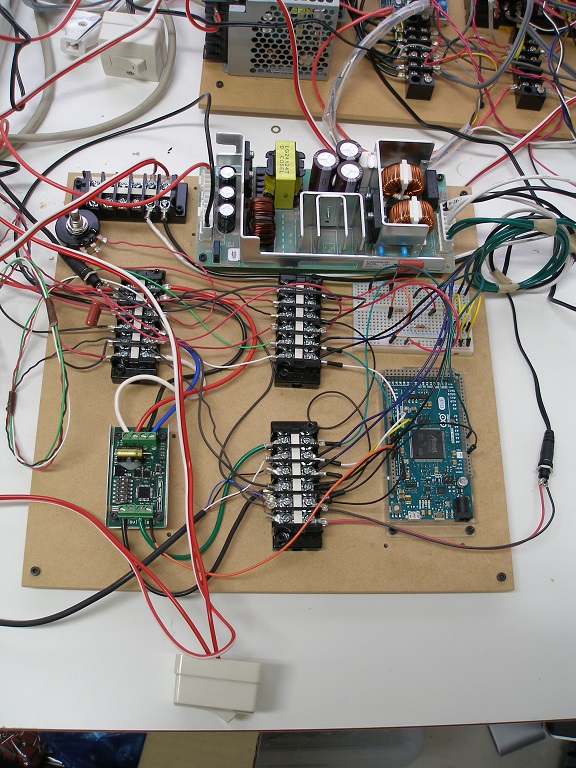
図12 倒立振子実験装置+Arduino Due
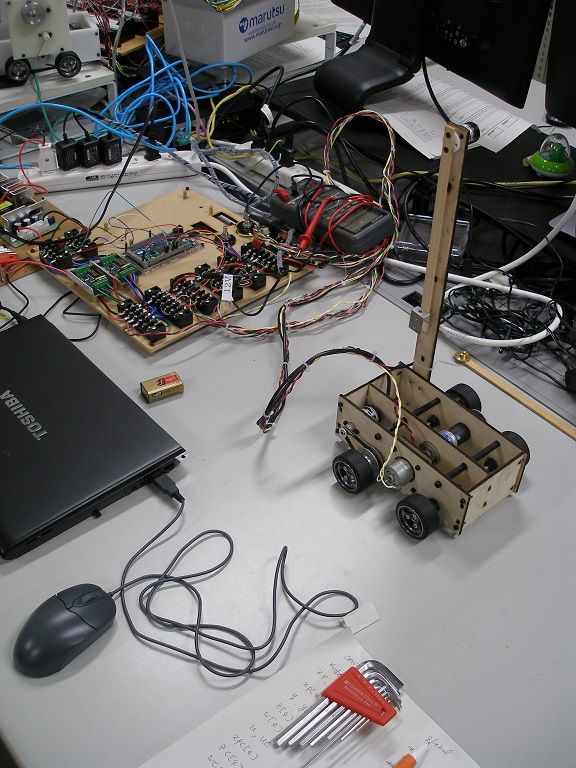
図13 倒立振子実験装置+Arduino Due(2017.11.30)
駆動用ギヤドDCモータ:ツカサ電工 TG-47G-FU-23-KB, 24V,モータドライバ:Dimension
Engineering SyRen 10A,
DCタコジェネレータの代用品:スリーピース TP-2732E-24,ロータリーエンコーダ:オムロン E6A2-CW5C 500P/R
0.5M(4逓倍で使用)
振り子角変位検出用ロータリーエンコーダ:マイクロテックラボラトリー MES-12-2048PC(4逓倍で使用)
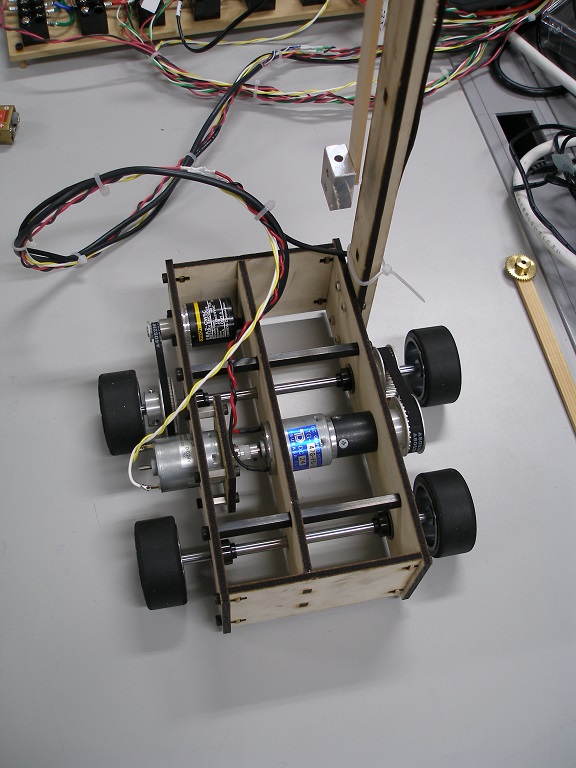
図14 倒立振子実験装置+Arduino Due
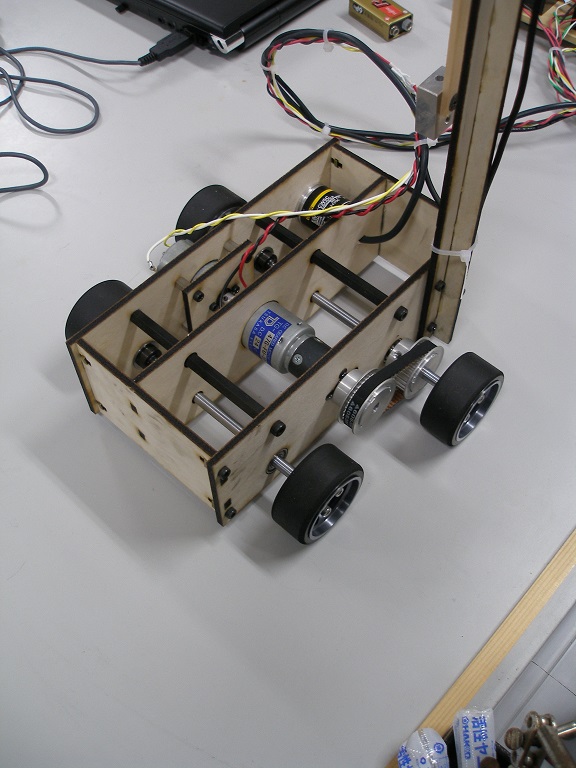
図15 倒立振子実験装置+Arduino Due
図16 倒立振子実験装置+Arduino Due
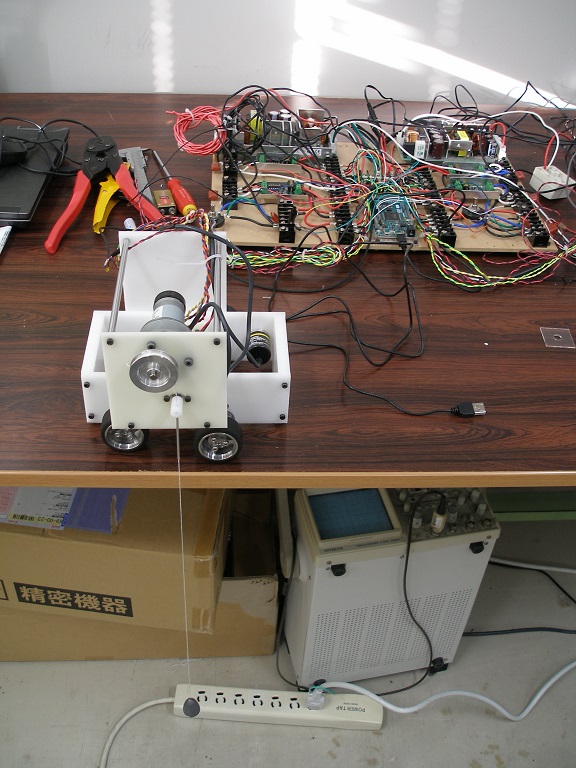
図17 クレーン系実験装置+Arduino Due(2017.12.15)
駆動用ギヤドDCモータ:ツカサ電工 TG-47G-FU-23-KB, 24V,モータドライバ:Dimension
Engineering SyRen 10A,
DCタコジェネレータの代用品:スリーピース TP-2732E-24,ロータリーエンコーダ:オムロン E6A2-CW5C 500P/R
0.5M(4逓倍で使用)
振り子角変位検出用ロータリーエンコーダ:オムロン E6A2-CW5C 500P/R 0.5M(4逓倍で使用)
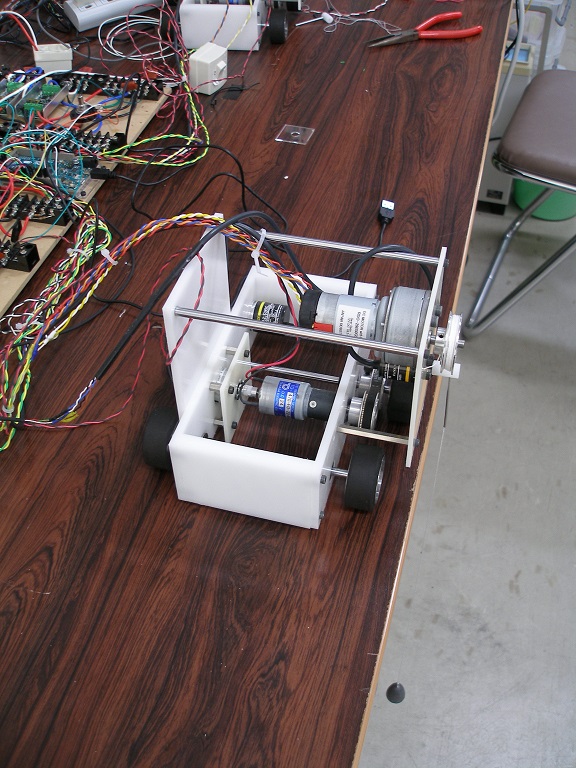
図18 クレーン系実験装置+Arduino Due
図19 クレーン系実験装置+Arduino Due
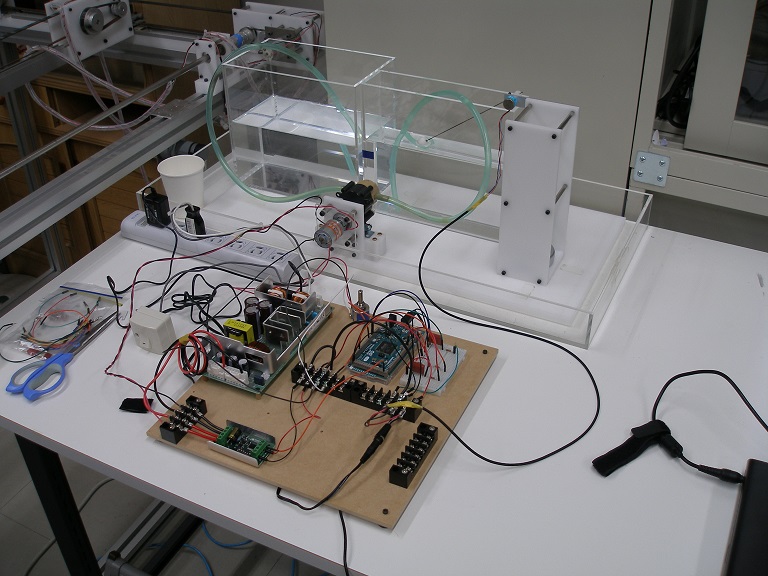
図20 水槽系実験装置+Arduino Due(2018.3.8)
ギヤポンプ:ツカサ電工 TG-47G-PU-DB4-KB, 24V
DCタコジェネレータの代用品:スリーピース TP-2846A-24
モータドライバ:Dimension
Engineering SyRen 10A
水位計測用ポテンショメータ:緑測器 CP-2UX
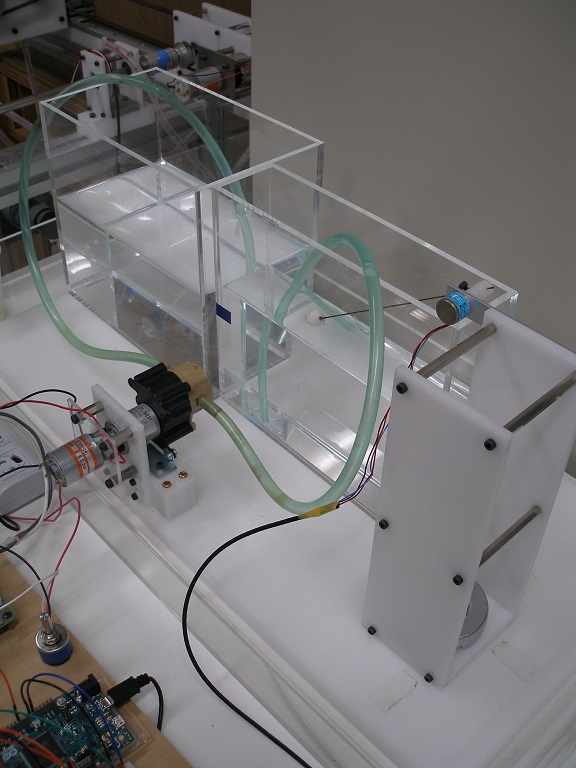
図21 水槽系実験装置+Arduino Due
図22 水槽系実験装置+Arduino Due
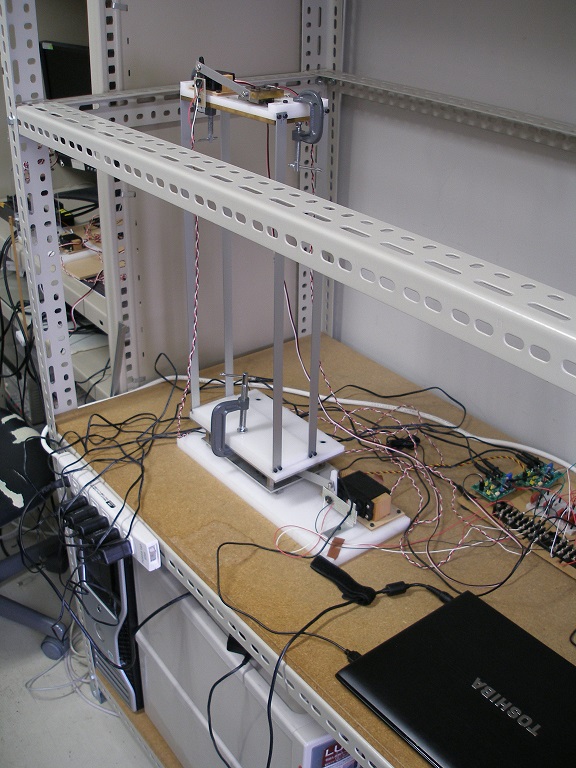
図23 1自由度構造系+Arduino Due(2018.1.14)
構造系
駆動用アクチュエータ:双葉電子工業 スタンダードアナログサーボ
S3003,トライステート PICアクチュエータキット
変位検出用センサー:アルプス電気抵抗式ポジションセンサー RDC501015A
加速度検出用センサー:秋月電気通商 3軸加速度センサモジュール KXR94-2050
振動台
駆動用アクチュエータ:ハイテック アナログサーボ
HS-805BB,トライステート PICアクチュエータキット
振動台変位検出用センサー:アルプス電気抵抗式ポジションセンサー RDC501015A
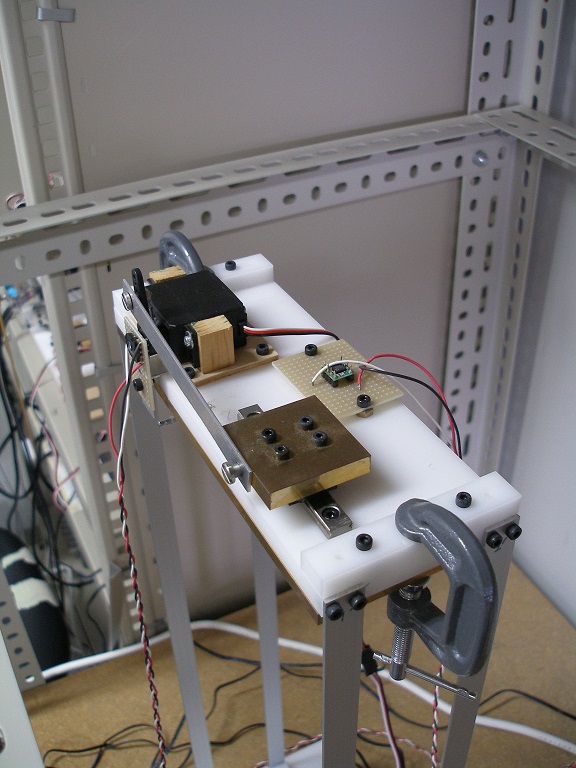
図24 1自由度構造系+Arduino Due

図25 1自由度構造系+Arduino Due
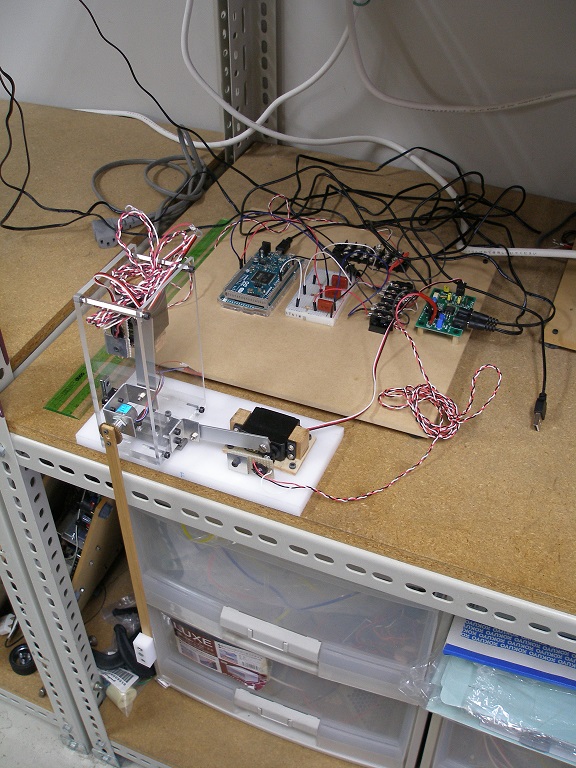
図26 支点鉛直平面内移動型振り子系+Arduino Due(2018.1.19)
支点駆動用アクチュエータ:双葉電子工業
スタンダードアナログサーボ S3003,トライステート PICアクチュエータキット
サーボ出力軸角変位角検出用センサー:アルプス電気抵抗式ポジションセンサー RDC501015A
振り子角変位検出用センサー:緑測器 無接触型回転角度センサ
CP-2UN
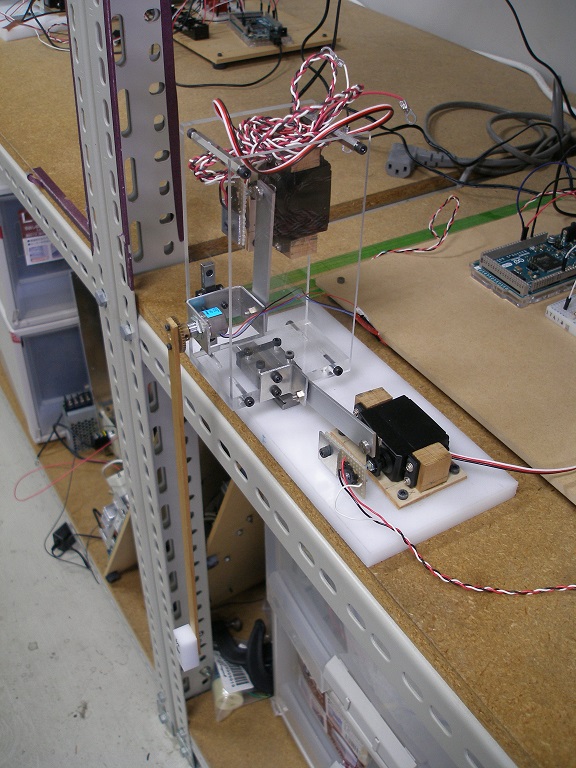
図27 支点鉛直平面内移動型振り子系+Arduino Due
図28 支点鉛直平面内移動型振り子系+Arduino Due
図29 台車-振り子系+Arduino Due(2018.2.2)
駆動用ギヤドDCモータ:ツカサ電工 TG-47C-FU-23-KB,24V
モータドライバ:Dimension
Engineering SyRen 10A
DCタコジェネレータの代用品:スリーピース TP-2732E-24
ビーム角検出用ロータリーエンコーダ:オムロン E6A2-CW5C 500P/R 0.5M(4逓倍で使用)
振り子角計測用ポテンショメータ:緑測器 CP-2UX
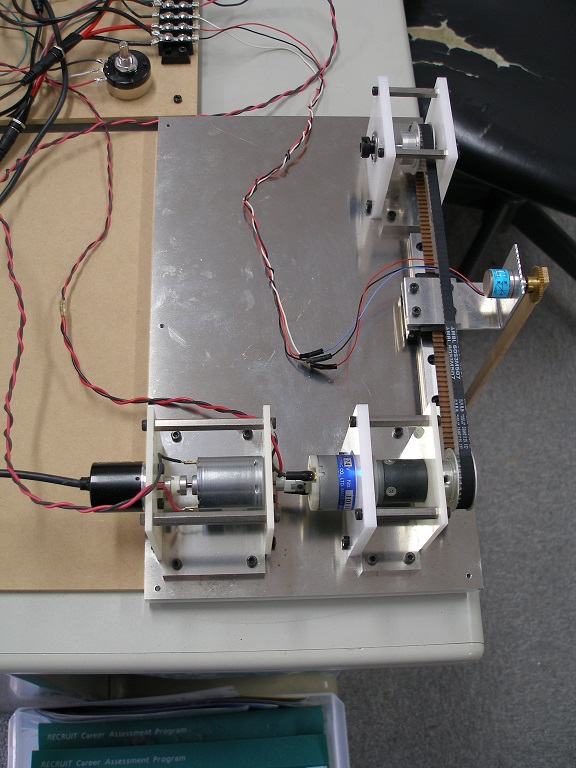
図30 台車-振り子系+Arduino Due
図31 台車-振り子系+Arduino Due

図32 振動台再生プロジェクト(2018.1.29)
古くなった振動台を再生するプロジェクトを開始しました。駆動部を再設計し,タイミングベルト類を交換する予定です。
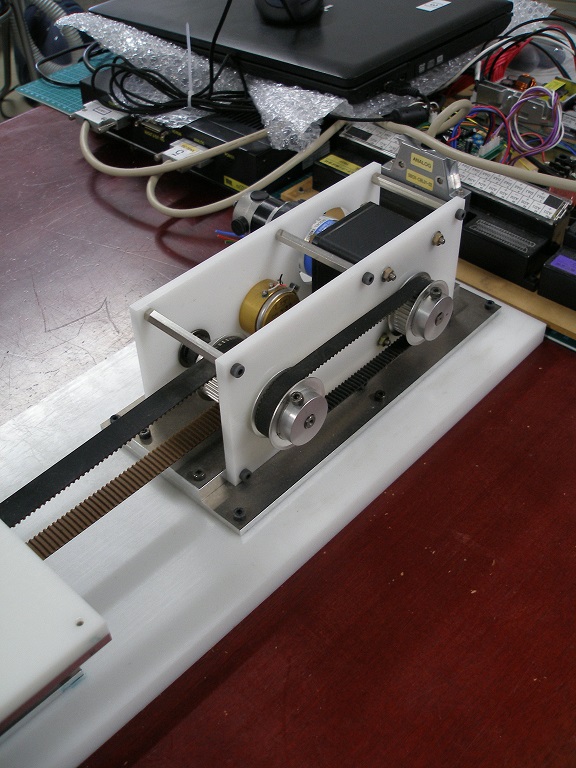
図33 振動台再生プロジェクト
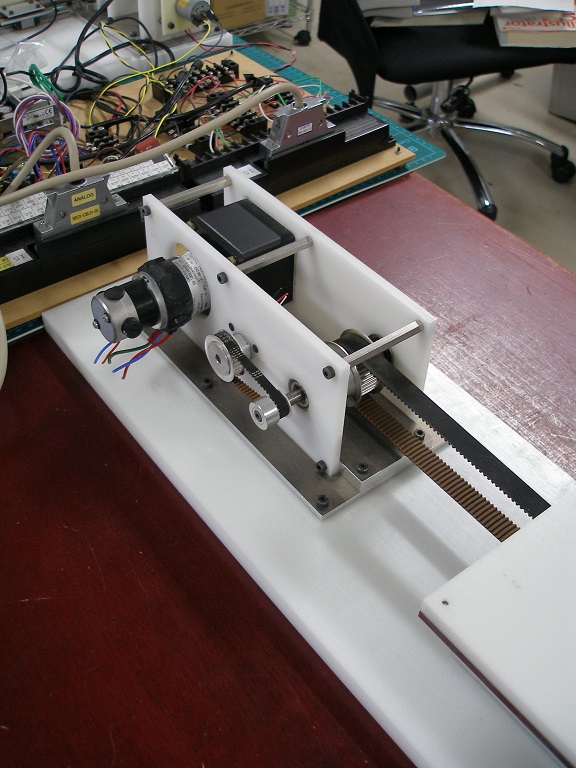
図34 振動台再生プロジェクト
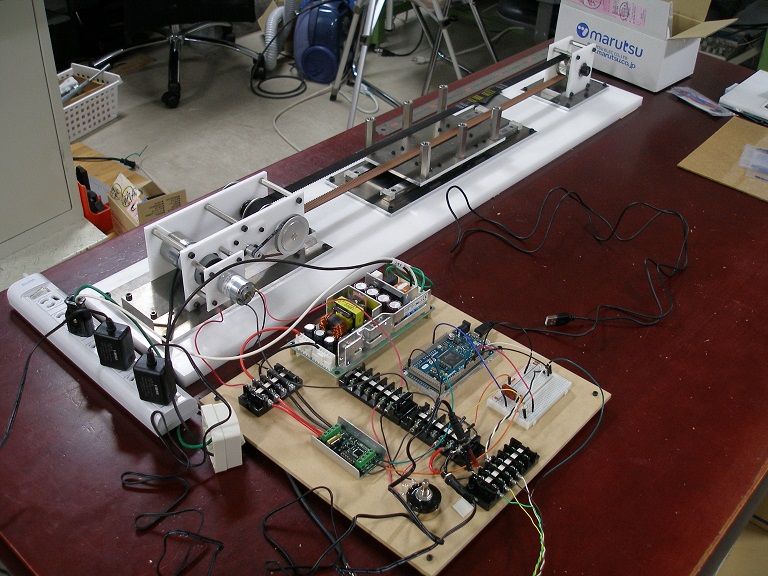
図35 振動台再生プロジェクト+Arduino Due(2018.2.25)
駆動用ギヤドDCモータ:ツカサ電工
TG-85R-SU-23.5-KB,12V
モータドライバ:Dimension
Engineering SyRen 10A
DCタコジェネレータの代用品:スリーピース TP-2732E-24
台車位置検出用ロータリーエンコーダ:オムロン E6A2-CW5C 500P/R 0.5M(4逓倍で使用)
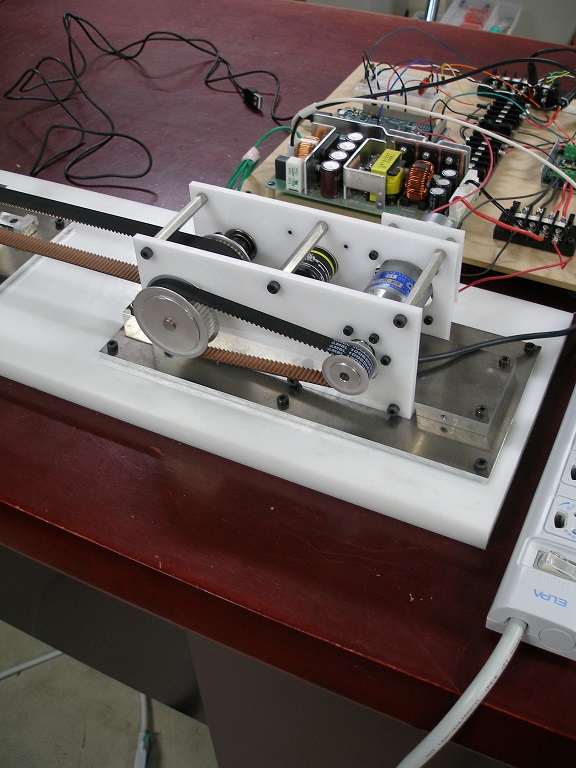
図36 振動台再生プロジェクト+Arduino Due
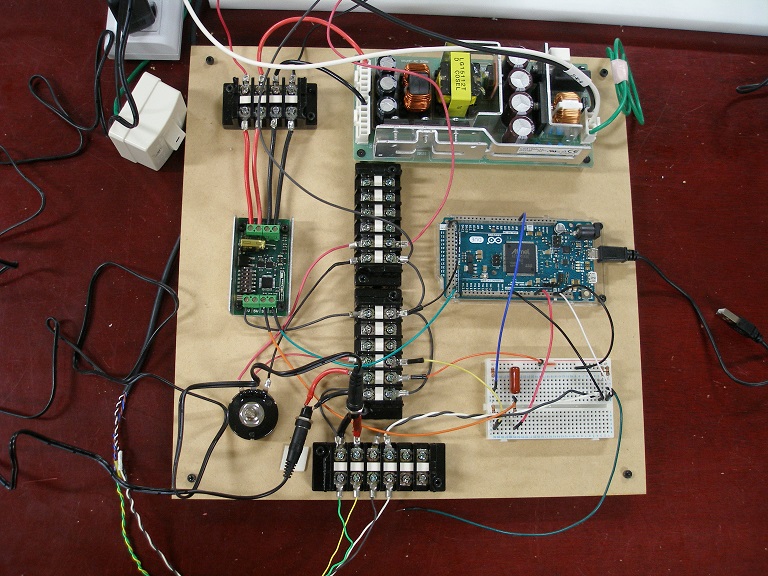
図37 振動台再生プロジェクト+Arduino Due