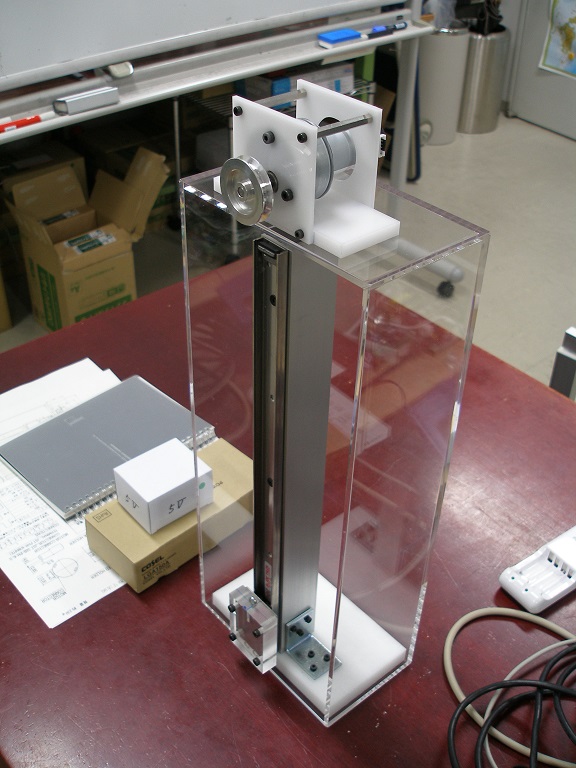
図1 エレベータ系実験装置(2016.5.27)
荷の巻上げ用ギヤドDCモータ:JAPAN ROBOTECH RDO-29B50G27A,モータドライバ:ツカサ電工 TCP-S30-650
スライドパック+スライドレール:THK FBW2560XR+400L
本研究室で設計製作している実験装置などを紹介します。
図1 エレベータ系実験装置(2016.5.27)
荷の巻上げ用ギヤドDCモータ:JAPAN
ROBOTECH RDO-29B50G27A,モータドライバ:ツカサ電工 TCP-S30-650
スライドパック+スライドレール:THK FBW2560XR+400L
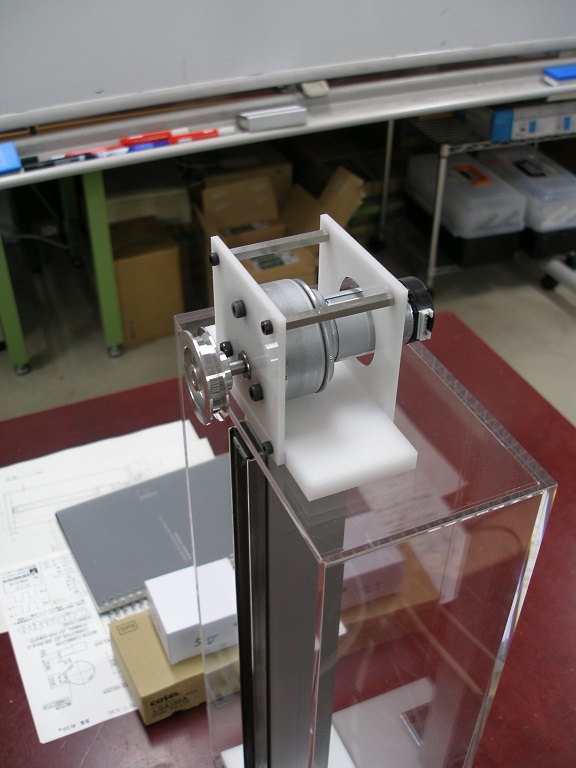
図2 エレベータ系実験装置
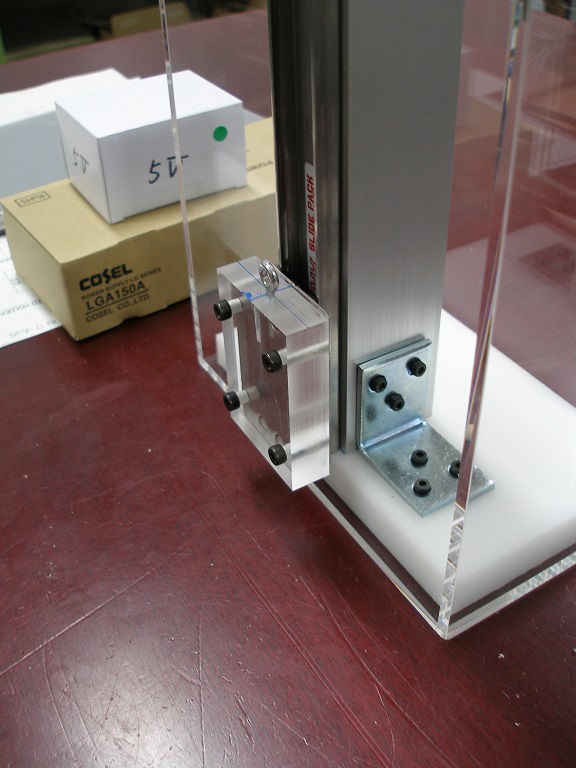
図3 エレベータ系実験装置
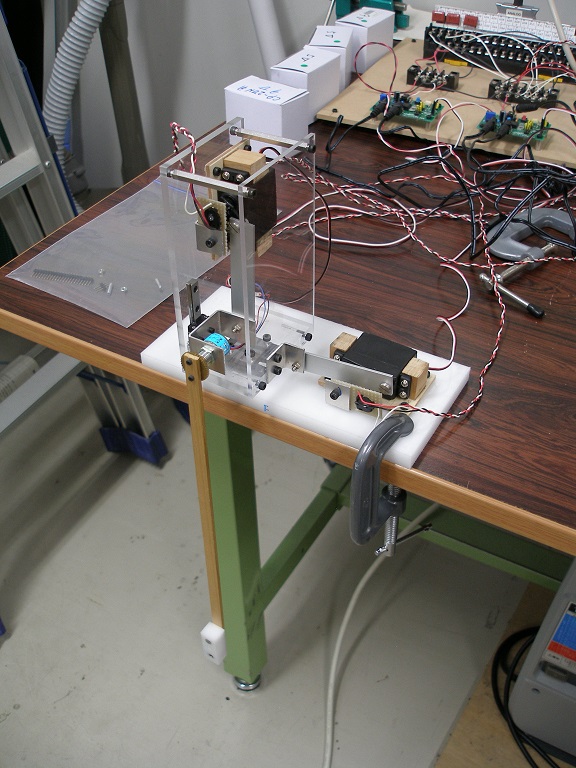
図4 支点鉛直平面内移動型振り子系(2016.7.11)
支点駆動用アクチュエータ:双葉電子工業
スタンダードアナログサーボ S3003,トライステート PICアクチュエータキット
サーボ出力軸角変位角検出用センサー:アルプス電気抵抗式ポジションセンサー RDC501015A
振り子角変位検出用センサー:緑測器 無接触型回転角度センサ CP-2UN
実験動画
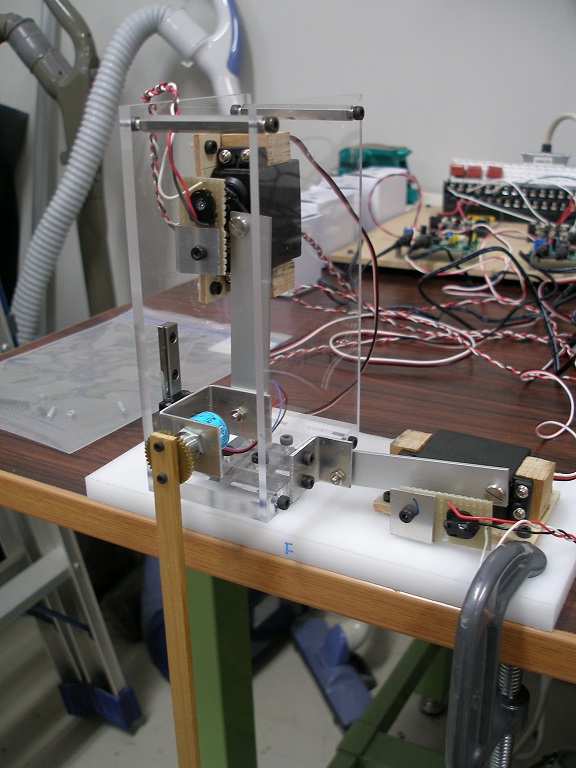
図5 支点鉛直平面内移動型振り子系
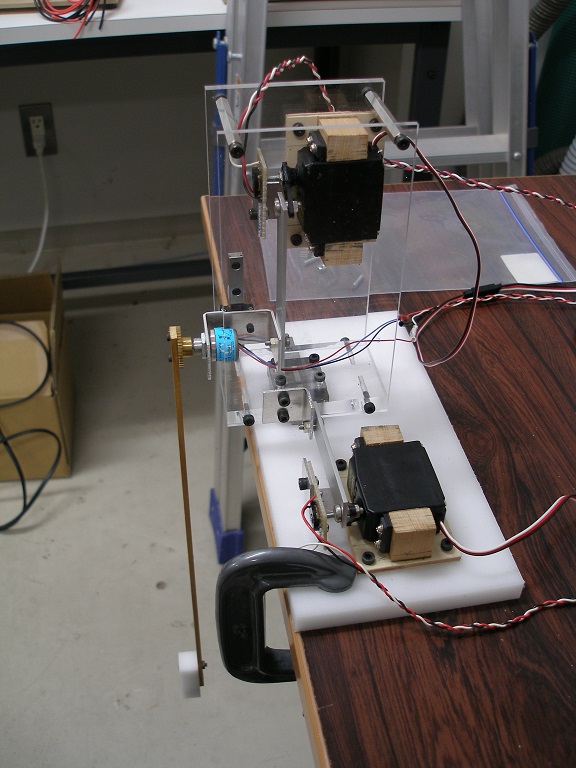
図6 支点鉛直平面内移動型振り子系
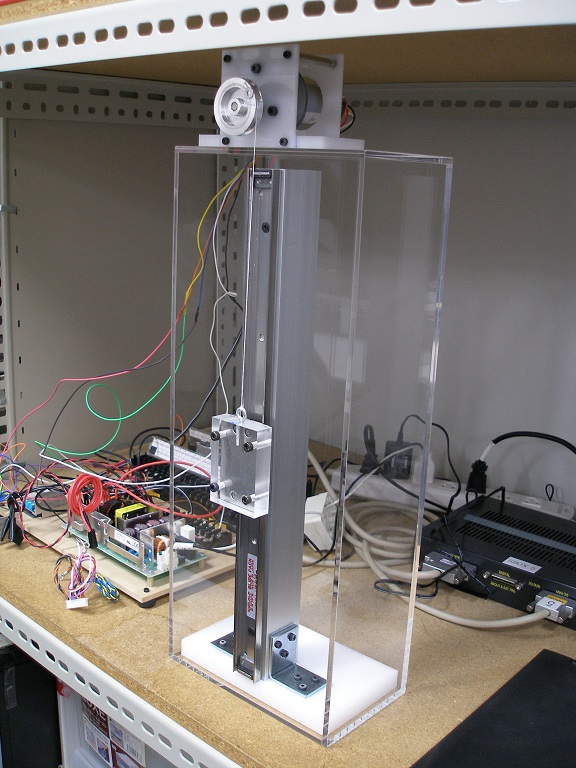
図7 エレベータ系(2016.7.11)
かご巻き上げ用ギヤドDCモータ:JAPAN ROBOTECH RDO-29B50G27A,モータドライバ:ツカサ電工 TCP-S30-650
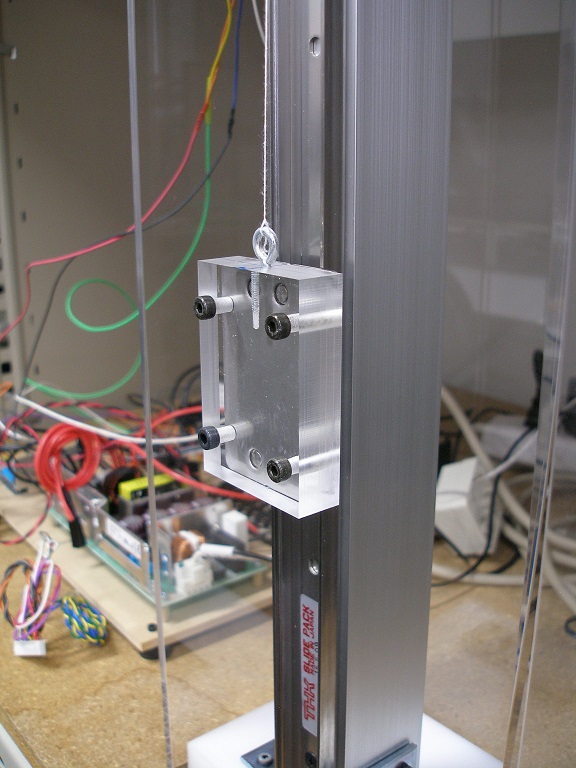
図8 エレベータ系
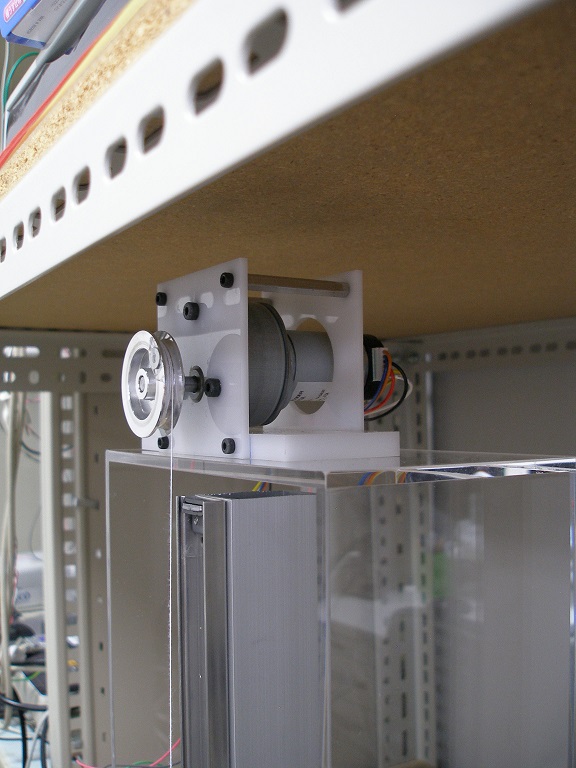
図9 エレベータ系
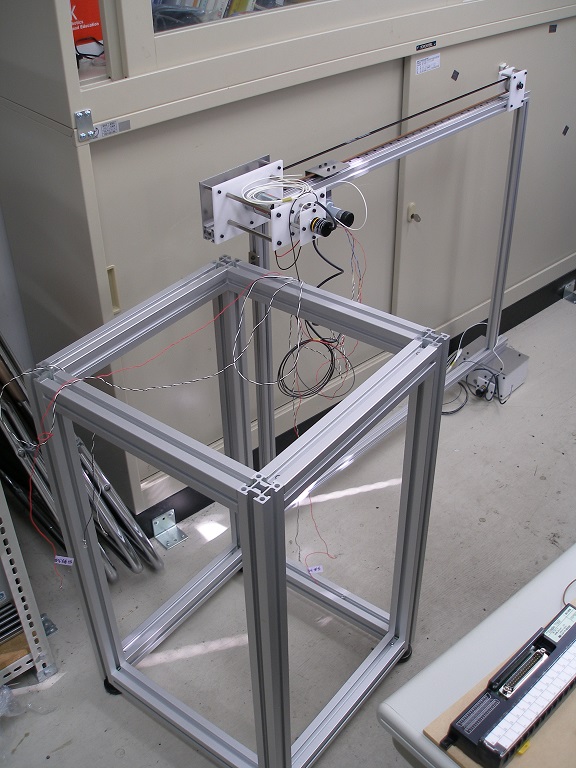
図10 タワー型クレーン系(2016.12.26)
台車駆動用ギヤドDCモータ:スリーピース TP-3640C-KM-18-S10-24,モータドライバ:スリーピース
TPDR-26,DCタコジェネレータの代用品:スリーピース TP-2732E-24
台車変位検出用ロータリーエンコーダ:オムロン E6A2-CW5C 500P/R 0.5M(4逓倍で使用)
荷の巻上げ用ギヤドDCモータ:JAPAN ROBOTECH RDO-29B50G27A,モータドライバ:ツカサ電工 TCP-S30-650
振り子角変位検出用センサー:緑測器 無接触型回転角度センサ CP-2UN
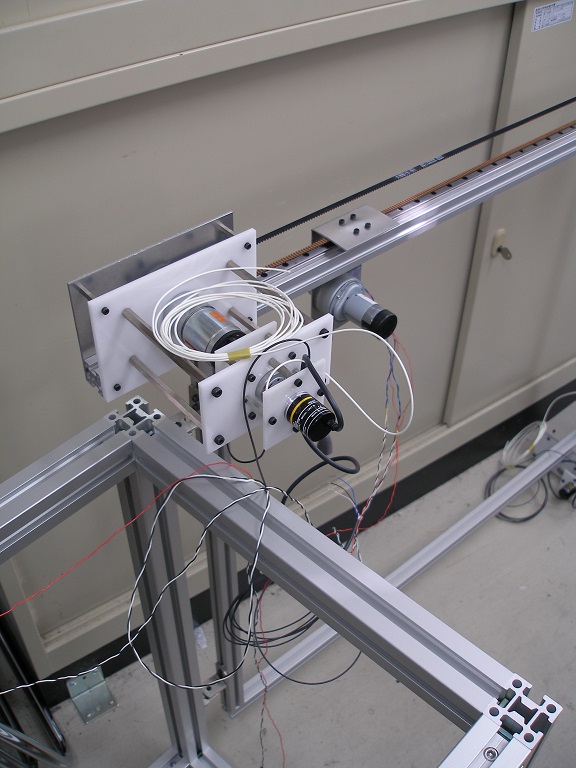
図11 タワー型クレーン系
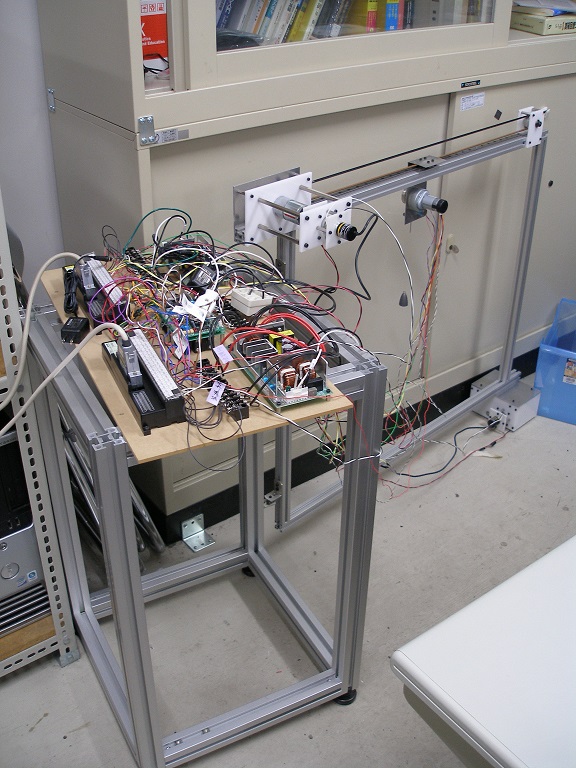
図11_1 タワー型クレーン系(2017.1.26) 配線しました。
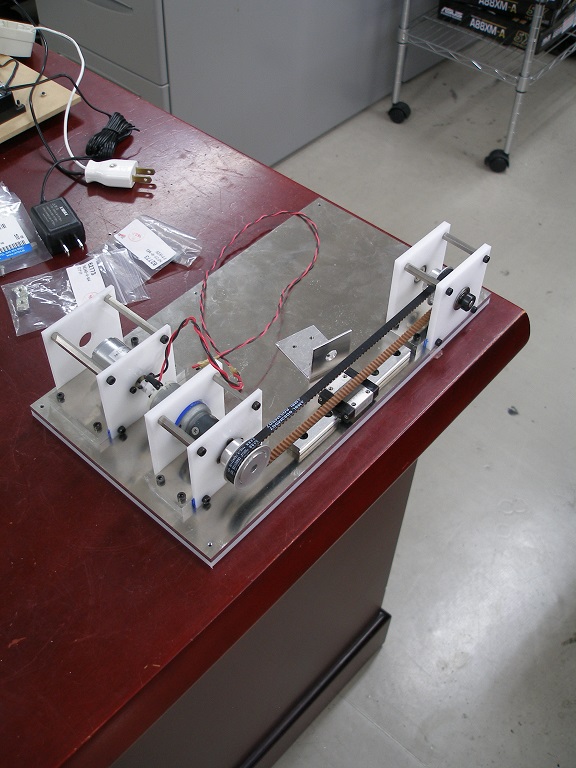
図12 台車―振り子系(2016.12.26)
駆動用ギヤドDCモータ:ツカサ電工 TG-47C-FU-23-KB,24V
モータドライバ:ツカサ電工 TCP-S30-300
DCタコジェネレータの代用品:スリーピース
TP-2732E-24
ビーム角検出用ロータリーエンコーダ:オムロン E6A2-CW5C 500P/R 0.5M(4逓倍で使用)
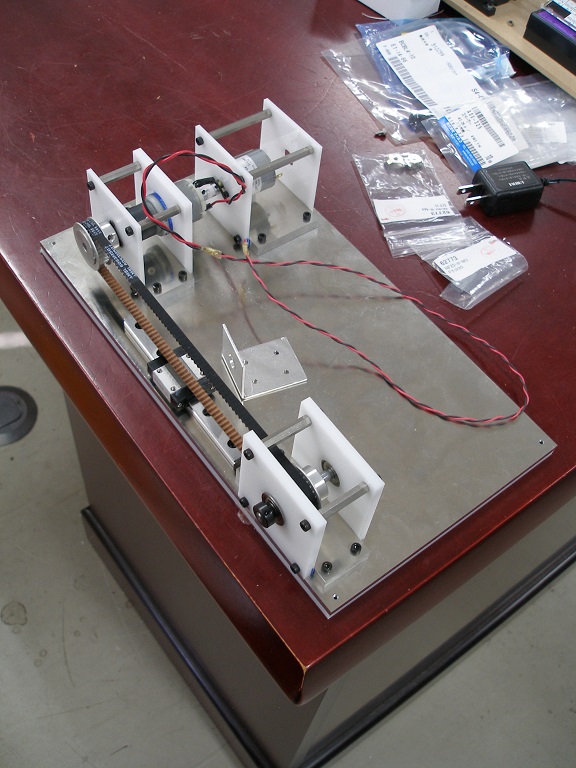
図12 台車―振り子系

図12_1 台車―振り子系(2017.1.26) 配線しました。
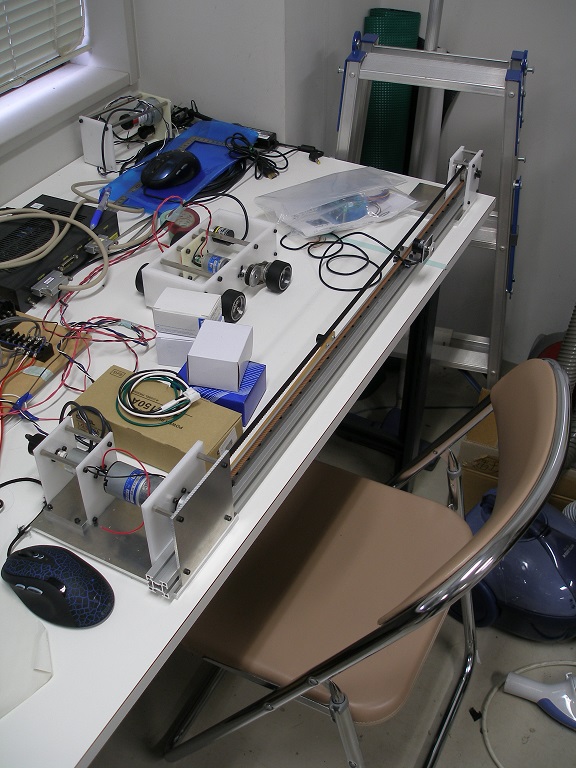
図13 倒立振子系(2017.1.8)
駆動用ギヤドDCモータ:ツカサ電工 TG-85R-SU-23.5-KA,モータドライバ:スリーピース
TPDR-26,DCタコジェネレータの代用品:スリーピース TP-2732E-24,ロータリーエンコーダ:オムロン E6A2-CW5C 500P/R
0.5M(4逓倍で使用)
振り子角変位検出用ロータリーエンコーダ:マイクロテックラボラトリー
MES-12-2048PC(4逓倍で使用)
図14 倒立振子系
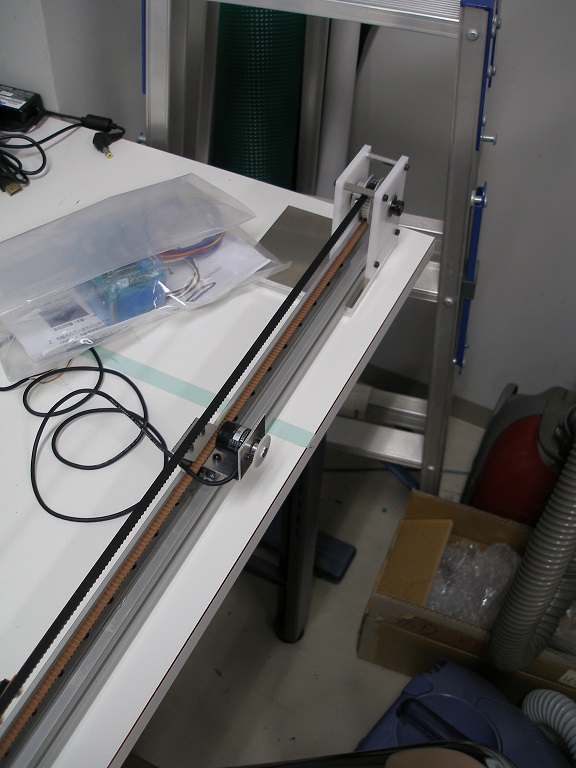
図15 倒立振子系
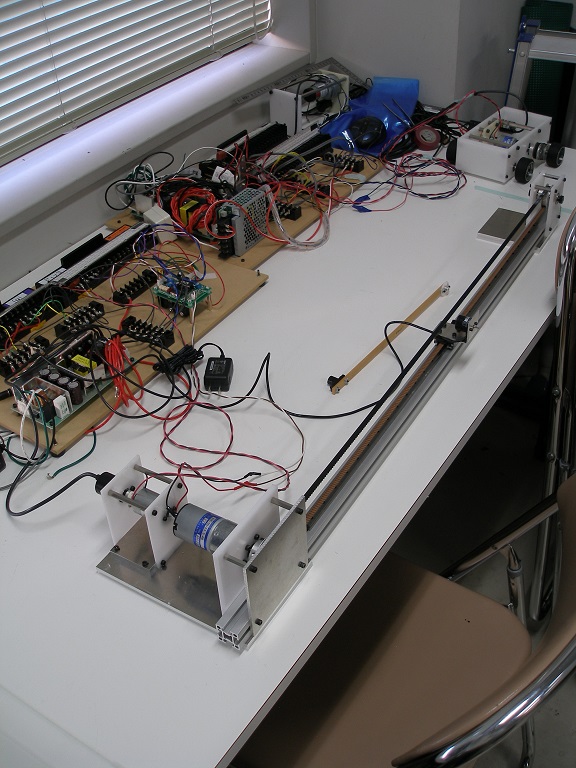
図15_1 倒立振子系(2017.1.26) 配線しました。
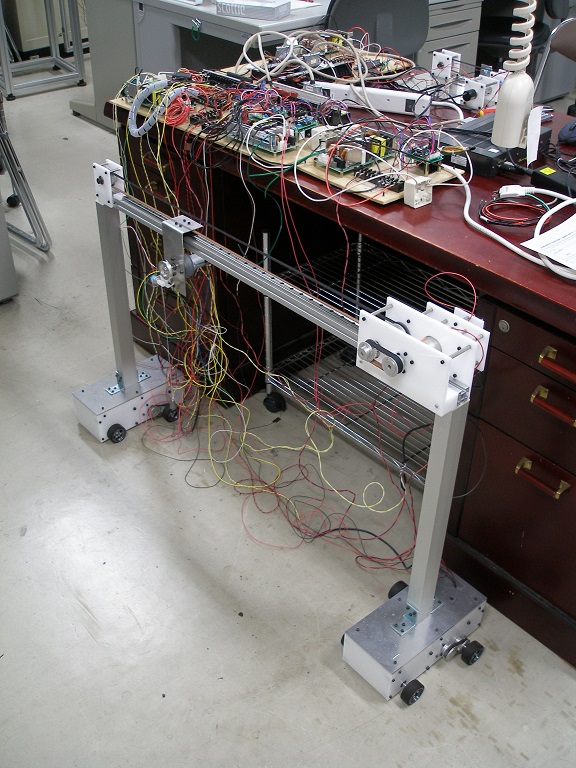
図16 門型クレーン系(2017.1.26) 梁部を製作しました。
台車駆動用ギヤドDCモータ:スリーピース TP-3640C-KM-18-S10-24,モータドライバ:スリーピース
TPDR-26,DCタコジェネレータの代用品:スリーピース TP-2732E-24
台車変位検出用ロータリーエンコーダ:オムロン E6A2-CW5C 500P/R 0.5M(4逓倍で使用)
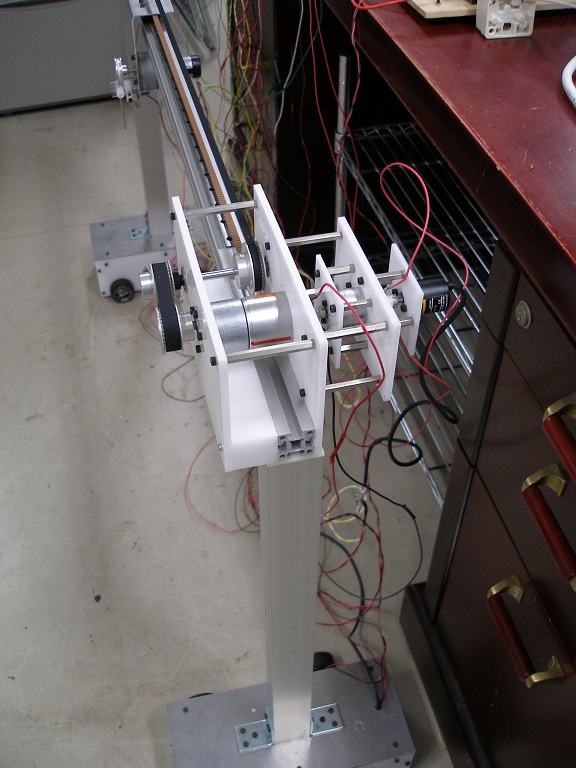
図17 門型クレーン系
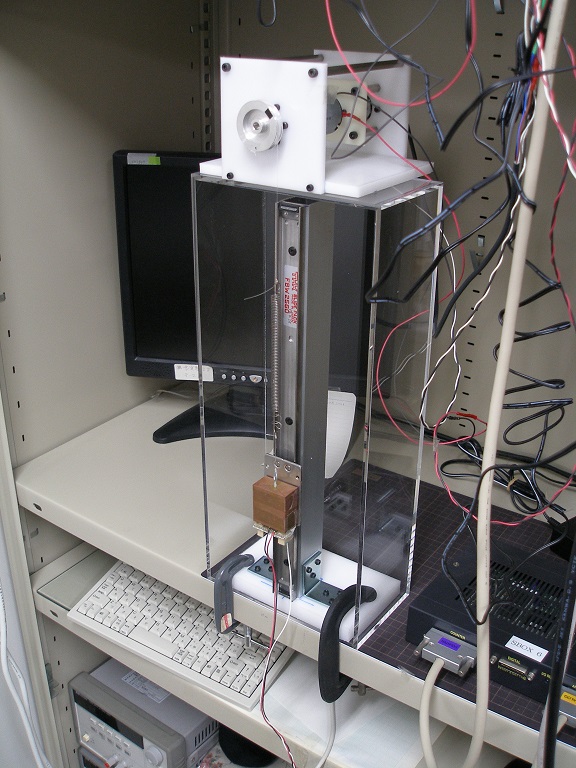
図18 エレベータ系(2017.1.26) かごを支持するスライドバック(THK FBW2560XR+400L)を追加しました。
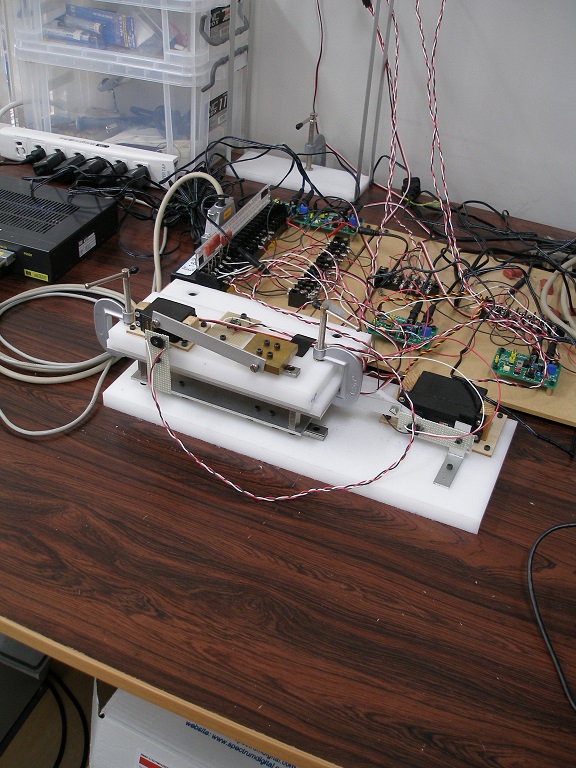
図19 振動絶縁実験装置(2017.2.8)
アクチュエータ:双葉電子工業 スタンダードアナログサーボ S3003,トライステート
PICアクチュエータキット
サーボ出力軸角変位角検出用センサー:アルプス電気抵抗式ポジションセンサー RDC501015A
筐体加速度検出用センサー:秋月電気通商 3軸加速度センサモジュール KXR94-2050
本研究科が提供している「社会人学び直しプログラム」(吉田担当講座)にて,ここで紹介しているような実験装置の設計・製作・制御方法を学習できます。
詳しくはこちら(募集要項)をご覧ください。