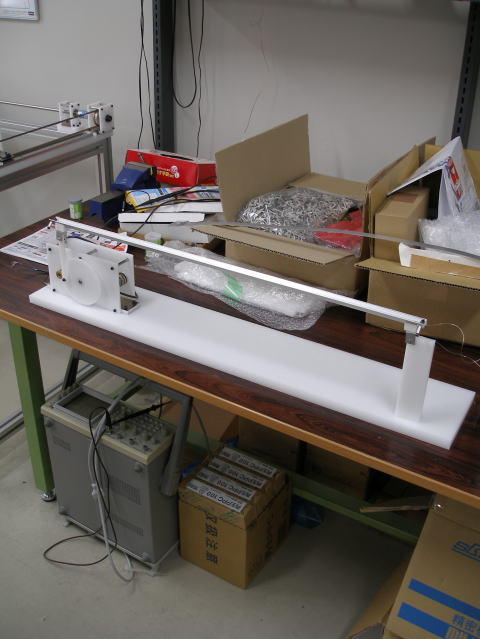
図1 ボールビーム系 駆動用ギヤドDCモータ:ツカサ電工 TG-47C-FU-23-KB,24V
モータドライバ:ツカサ電工 TCP-S30-300
DCタコジェネレータの代用品:スリーピース TP-2846A-24
ビーム角検出用ロータリーエンコーダ:オムロン E6A2-CW5C 500P/R 0.5M(4逓倍で使用)
本研究室で設計製作している実験装置などを紹介します。
図1 ボールビーム系 駆動用ギヤドDCモータ:ツカサ電工 TG-47C-FU-23-KB,24V
モータドライバ:ツカサ電工 TCP-S30-300
DCタコジェネレータの代用品:スリーピース TP-2846A-24
ビーム角検出用ロータリーエンコーダ:オムロン E6A2-CW5C 500P/R 0.5M(4逓倍で使用)
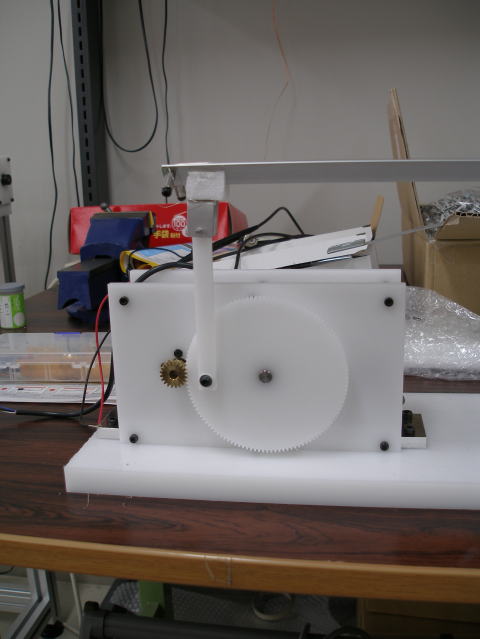
図2 ボールビーム系 駆動側歯車:モジュール0.8,歯数20,黄銅
従動側歯車:モジュール0.8,歯数120,ポリアセタール

図3 ボールビーム系 ボール位置検出用抵抗線:ニクロム線,Φ0.32mm
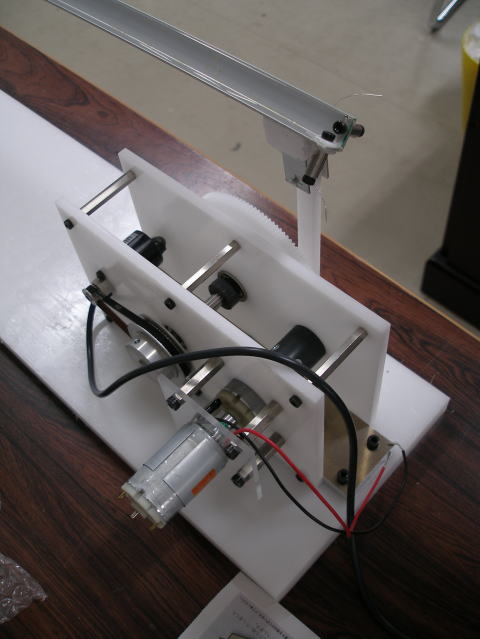
図4 ボールビーム系 ビーム角検出用エンコーダはプーリーベルト機構(プーリー歯数60,15)によって分解能を4倍にしています。

図4-1 ボールビーム系 配線して試運転しました。ボール位置検出用電源:単3乾電池1.5V
ビーム:アルミアングル 1.5×15×15×700mm(アルマイト処理)
ボール:鋼球(直径25mm)
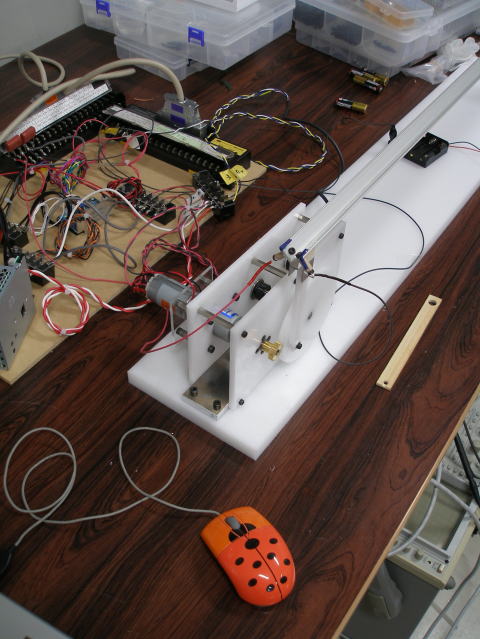
図4-2 ボールビーム系 配線して試運転しました。
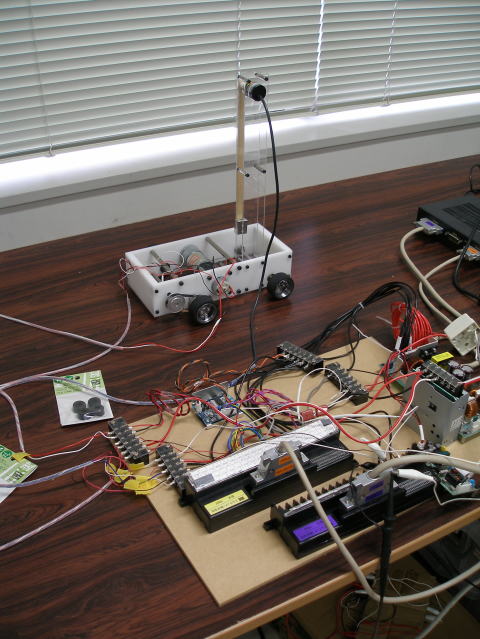
図5 自走式倒立振子系
駆動用ギヤドDCモータ:スリーピース TP-3640C-KM-18-S10-24
モータドライバ:ツカサ電工 TCP-S30-650
DCタコジェネレータの代用品:スリーピース TP-2846A-24
振子角検出用ロータリーエンコーダ:オムロン E6A2-CW5C 500P/R 0.5M(4逓倍で使用)
台車位置検出用ポテンショメータ:日本電産サーボ MF10,5kΩ
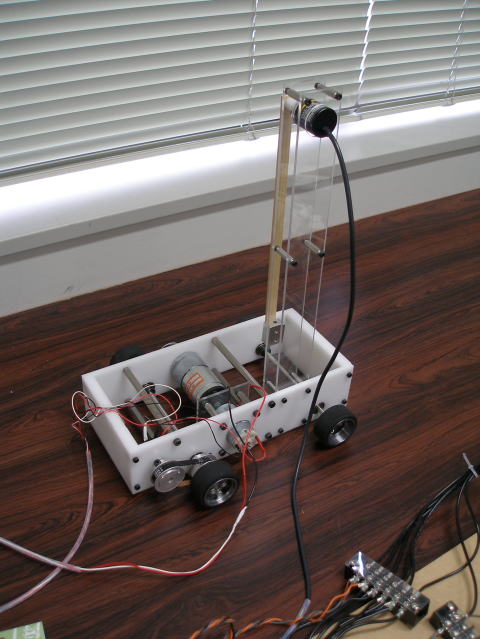
図6 自走式倒立振子
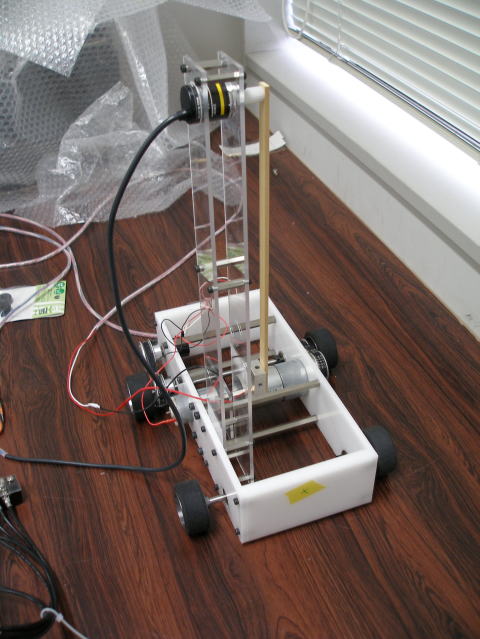
図7 自走式倒立振子
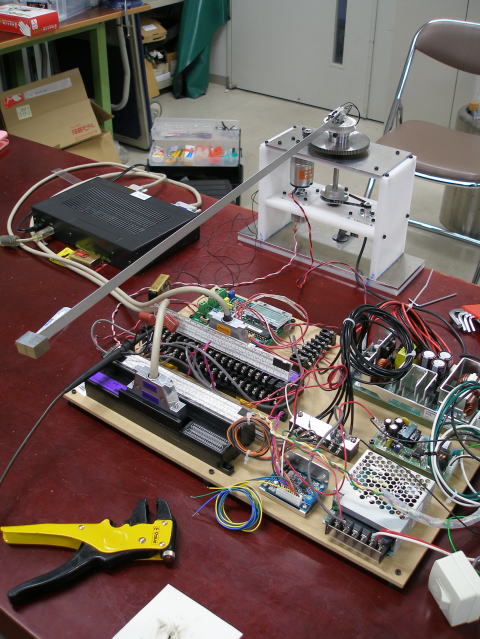
図8 フレキシブルビーム系 配線して試運転しました。
駆動用ギヤドDCモータ:スリーピース TP-3640C-KM-18-S10-24
モータドライバ:ツカサ電工 TCP-S30-650
DCタコジェネレータの代用品:スリーピース TP-2846A-24
回転軸角変位検出用ロータリーエンコーダ:オムロン E6A2-CW5C 500P/R 0.5M(4逓倍で使用)
ビームのたわみ角検出用ひずみゲージ:共和電業 KFG-2-120-C1-11(120Ω,2ゲージ法で使用)
ひずみゲージアンプ:共和電業 SGI-100A
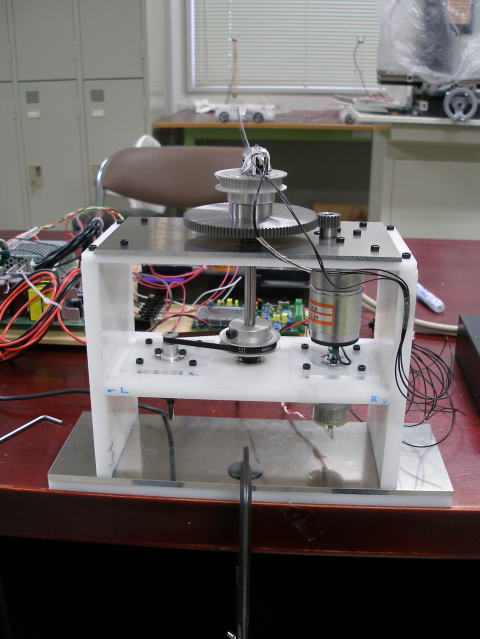
図9 フレキシブルビーム系 回転軸角変位検出用エンコーダはプーリーベルト機構(プーリー歯数60,15)によって分解能を4倍にしています。
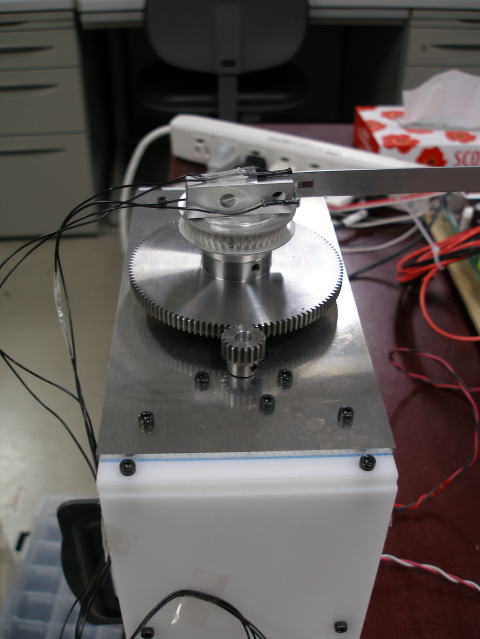
図10 フレキシブルビーム系
駆動側歯車:モジュール 0.75,歯数 20
従動側歯車:モジュール 0.75,歯数 120
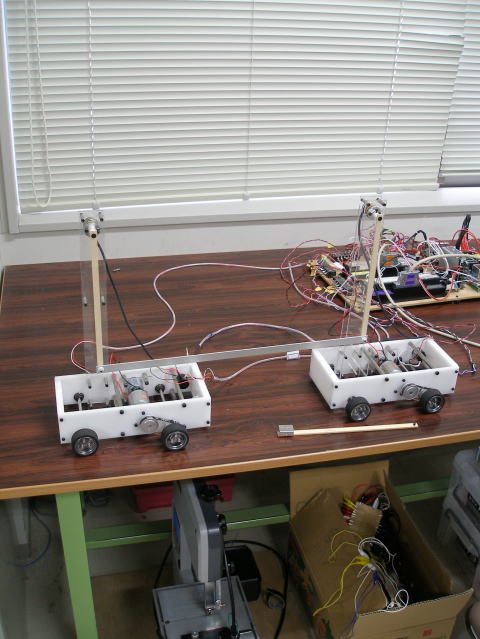
図11 2連倒立振子系 配線して試運転しました。共吊りクレーン系の倒立版です。(2012/12/15)
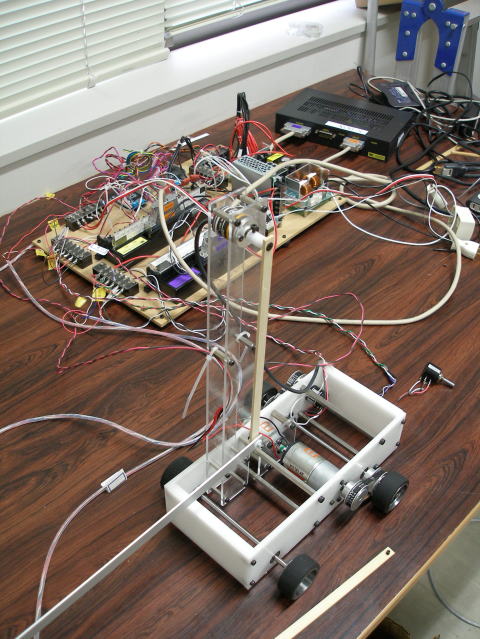
図12 2連倒立振子系
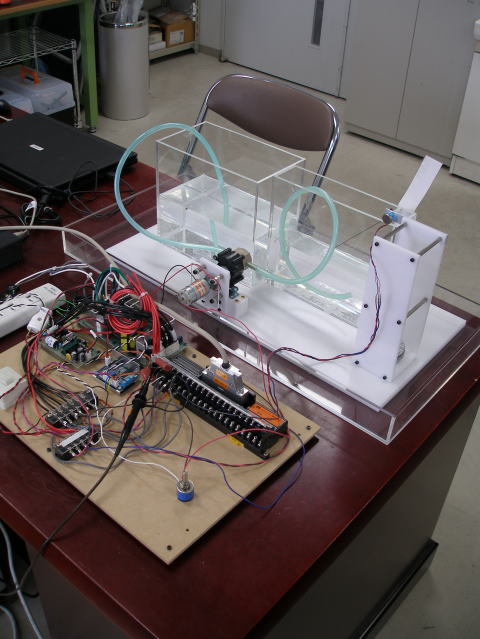
図13 水槽系(水位制御実験用)(2013.5.11)
ギヤポンプ:ツカサ電工 TG-47G-PU-DB4-KB, 24V
DCタコジェネレータの代用品:スリーピース TP-2846A-24
モータドライバ:ツカサ電工 TCP-S30-300
水位計測用ポテンショメータ:緑測器 CP-2UX
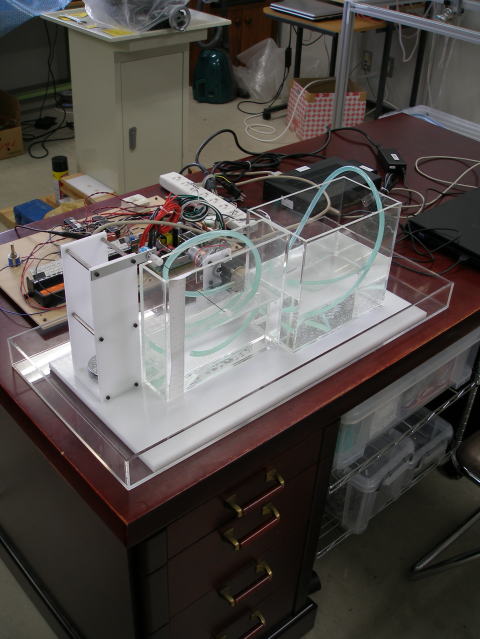
図14 水槽系
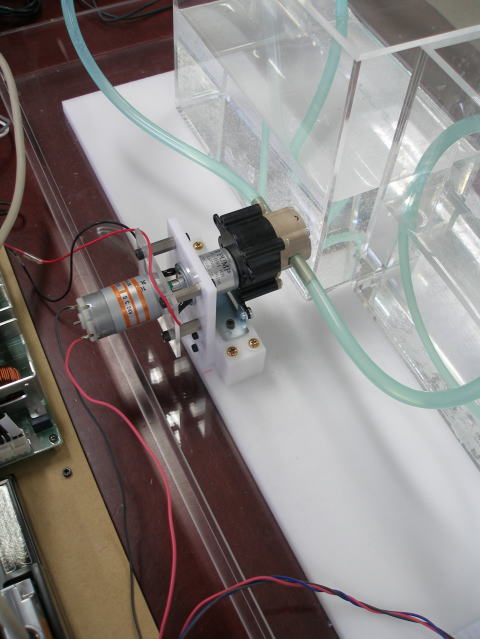
図15 水槽系
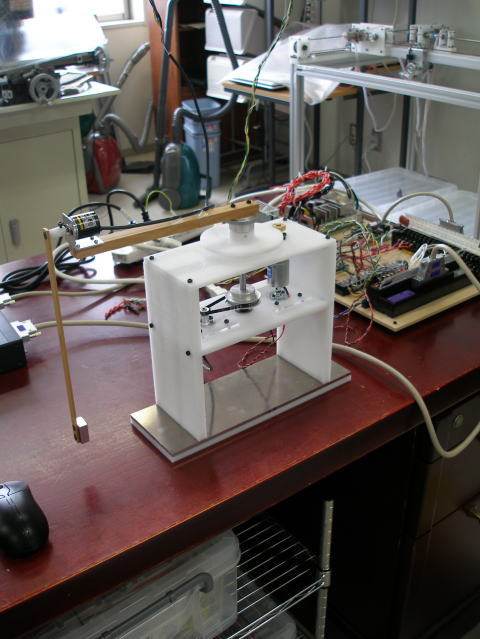
図16 回転型倒立振子系(2013.6.15)
駆動用ギヤドDCモータ:ツカサ電工 TG-47G-FU-23-KB,24V
モータドライバ:ツカサ電工 TCP-S30-300
DCタコジェネレータの代用品:スリーピース TP-2732E-24
回転軸および振り子角変位検出用ロータリーエンコーダ:オムロン E6A2-CW5C
500P/R 0.5M(4逓倍で使用)
駆動側歯車:モジュール0.8,歯数20,黄銅
従動側歯車:モジュール0.8,歯数120,ポリアセタール
回転軸用リニアシャフト:Φ8mm,SUJ2,硬質クロムメッキ処理
回転軸用スラストベアリング:オリジン電気 CRT8-16
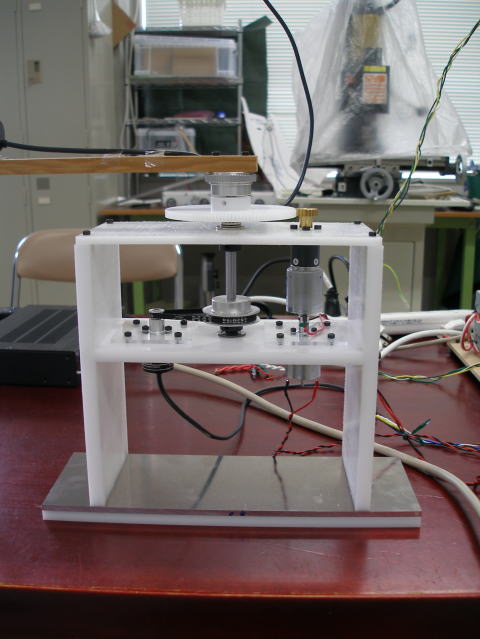
図18 回転型倒立振子系
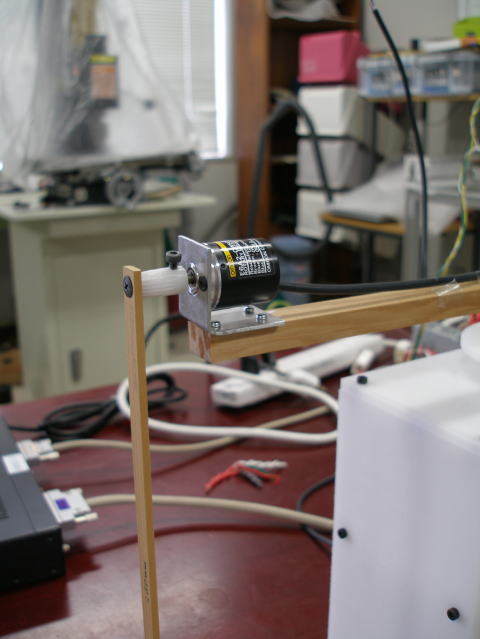
図19 回転型倒立振子系

図20 台車系 理工特別コースプロジェクトセミナー2(学部2年前期)の研究課題として設計・製作しました(2013.7.4)。
駆動用ギヤドDCモータ:ツカサ電工 TG-47G-FU-23-KB,24V
モータドライバ:ツカサ電工 TCP-S30-300
DCタコジェネレータの代用品:スリーピース TP-2732E-24
台車変位検出用ロータリーエンコーダ:オムロン E6A2-CW5C 500P/R 0.5M(4逓倍で使用)
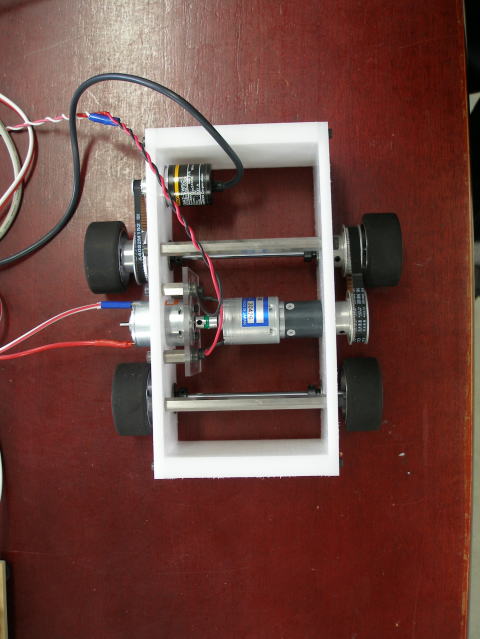
図21 台車系
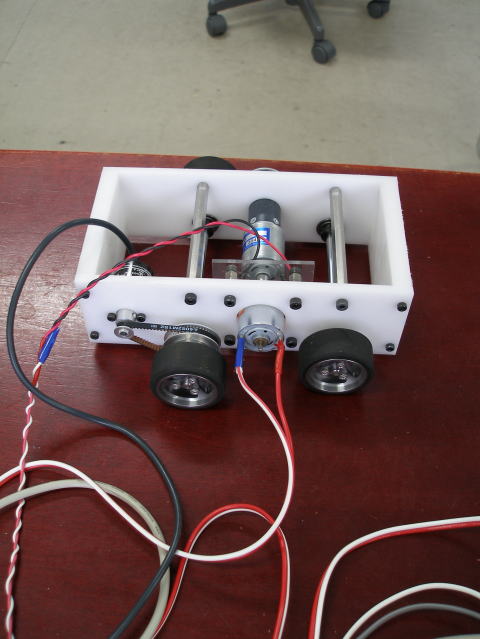
図22 台車系

図23 フレキシブルビーム系(2013.9.10)
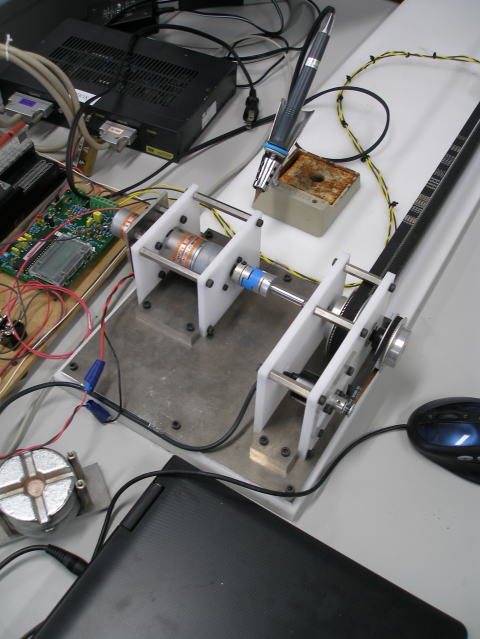
図24 フレキシブルビーム系
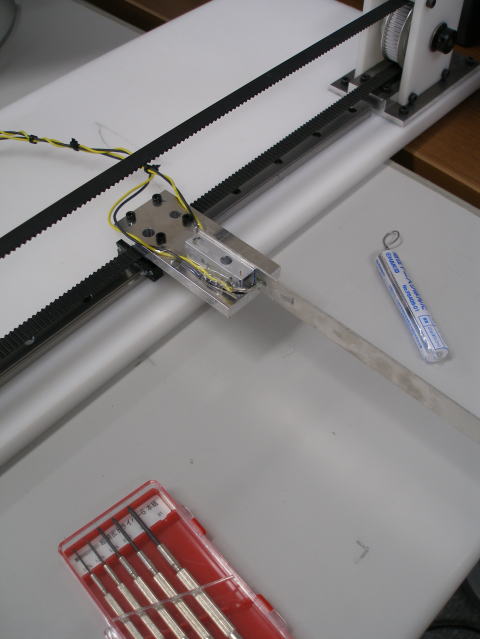
図25 フレキシブルビーム系
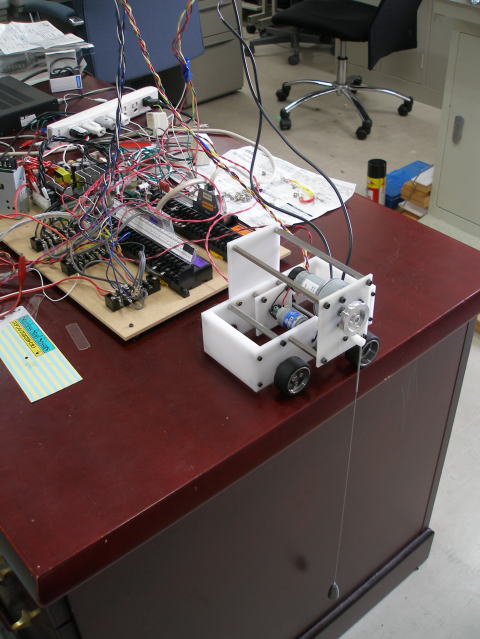
図26 クレーン系(2013.11.1)
駆動用ギヤドDCモータ:ツカサ電工 TG-47G-FU-23-KB,24V
上記のモータドライバ:ツカサ電工 TCP-S30-300
DCタコジェネレータの代用品:スリーピース TP-2732E-24
台車変位および振子角検出用ロータリーエンコーダ:オムロン E6A2-CW5C 500P/R
0.5M(4逓倍で使用)
荷の巻上げ用ギヤドDCモータ:JAPAN ROBOTECH RDO-29B50G27A
上記のモータドライバ:ツカサ電工 TCP-S30-650
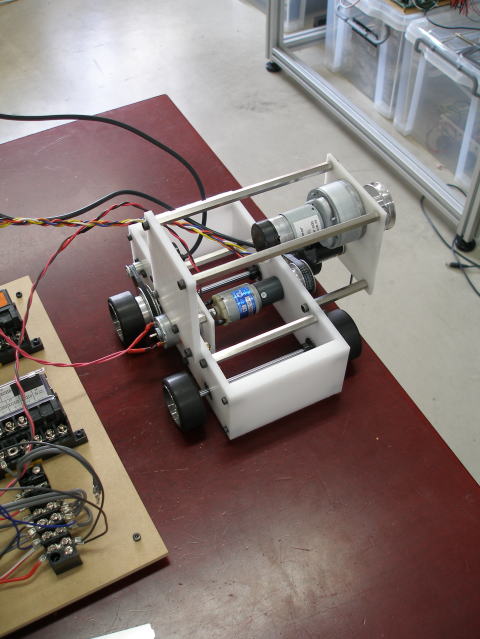
図27 クレーン系
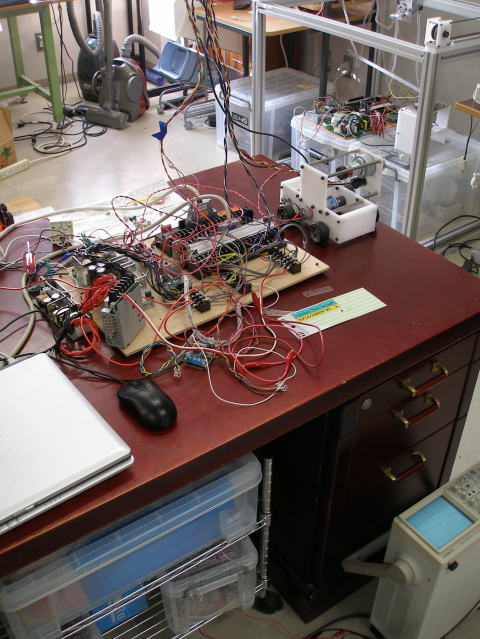
図28 クレーン系

図29 2自由度構造系+振動台(2014.1.20)
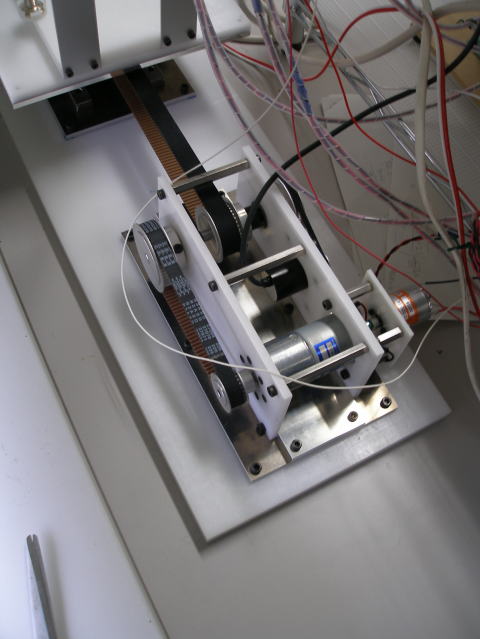
図30 2自由度構造系+振動台
振動台
駆動用ギヤドDCモータ:ツカサ電工 TG-85R-SU-23.5-KB,12V
上記のモータドライバ:スリーピース TPDR-26
DCタコジェネレータの代用品:スリーピース TP-2732E-24
振動台車変位検出用ロータリーエンコーダ:オムロン E6A2-CW5C 500P/R
0.5M(4逓倍で使用)
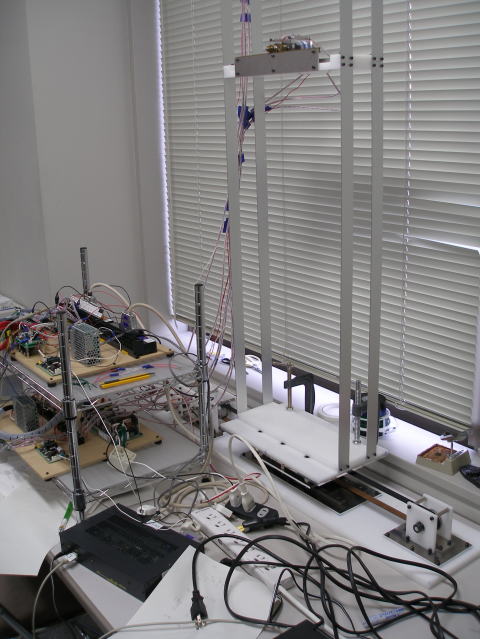
図31 2自由度構造系+振動台
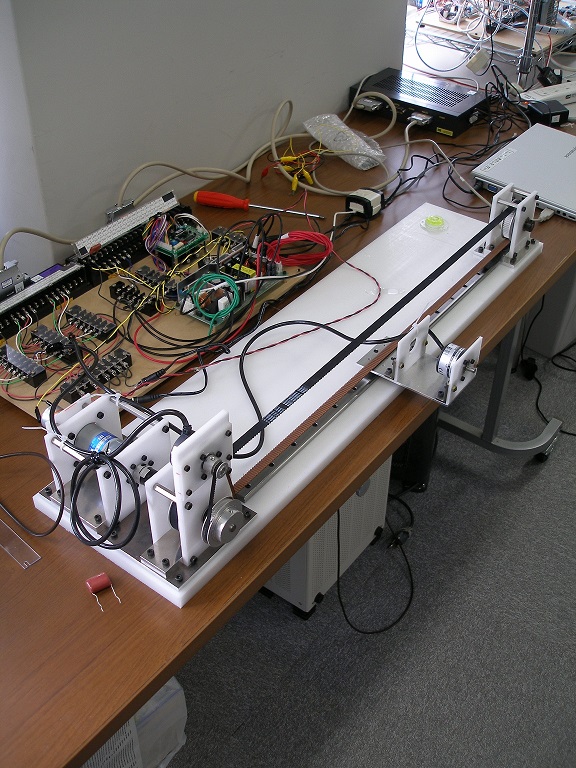
図32 2重倒立振子系(2014.6.23)
駆動用ギヤドDCモータ:ツカサ電工 TG-85R-SU-23.5-KB,12V
上記のモータドライバ:スリーピース TPDR-26
DCタコジェネレータの代用品:スリーピース TP-2732E-24
台車変位検出用ロータリーエンコーダ:光洋電工 TRD-S2500A(4逓倍で使用)
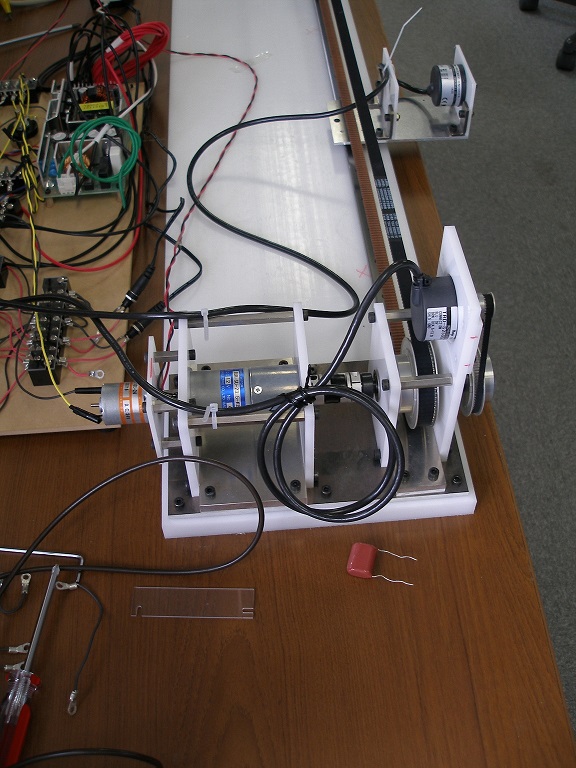
図33 2重倒立振子系

図34 ボールビーム系(2014.7.12)

図35 ボールビーム系
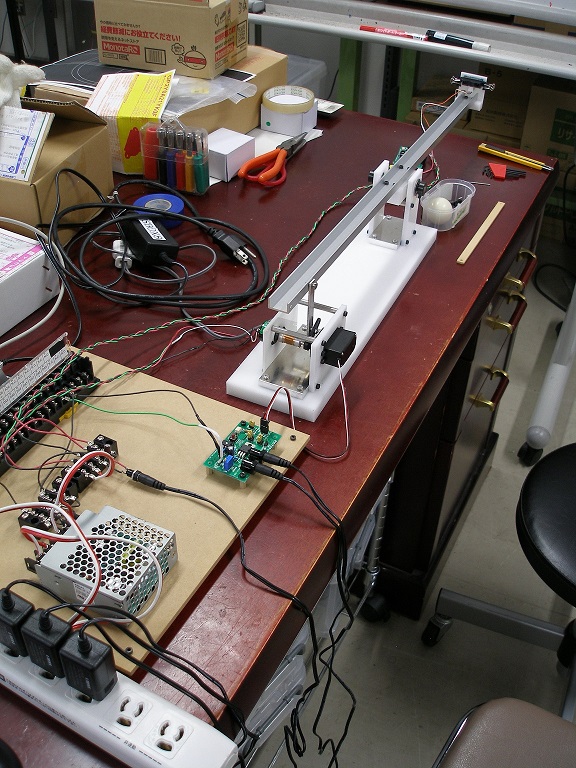
図36 ボールビーム系( 2014.9.4)
ビーム駆動用アクチュエータ:双葉電子工業 スタンダードアナログサーボ
S3003,トライステート PICアクチュエータキット
ビーム角検出用ポテンショメータ:緑測器 CP-2FK(b)
ボール位置検出用赤外線センサー:シャープ 測距モジュールGP2Y0A21YK
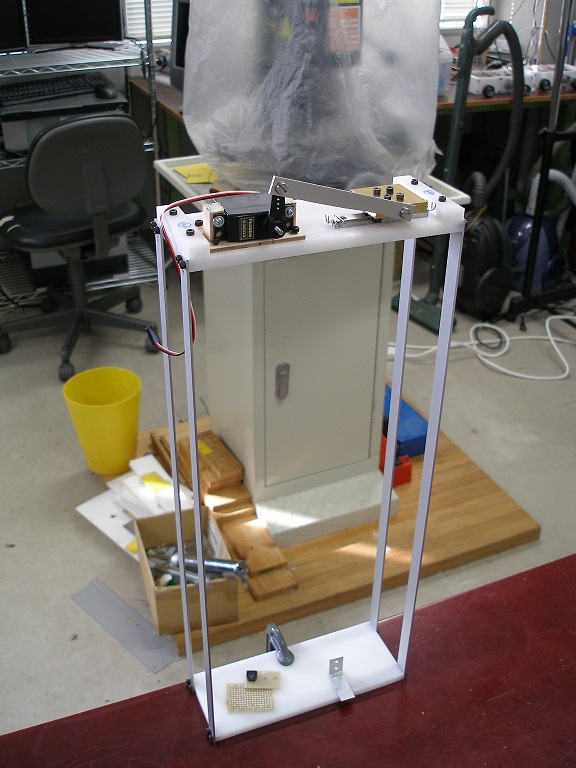
図37 1自由度構造系(2014.10.3)
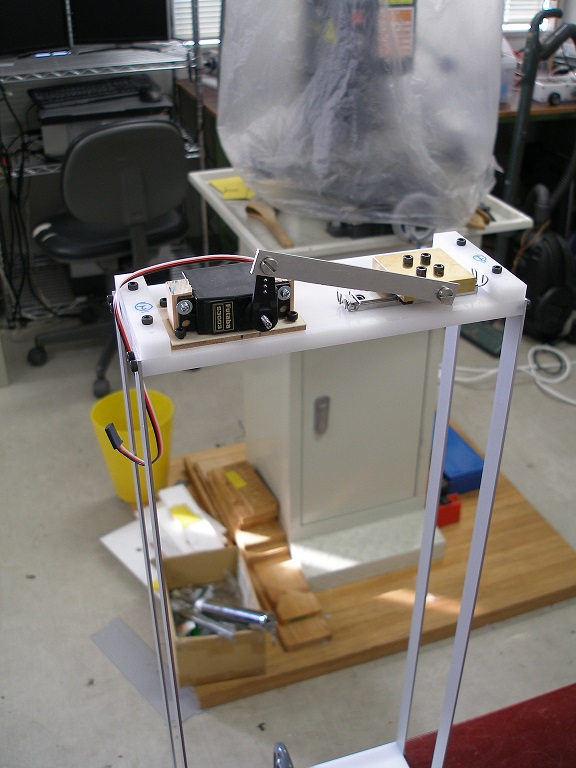
図38 1自由度構造系
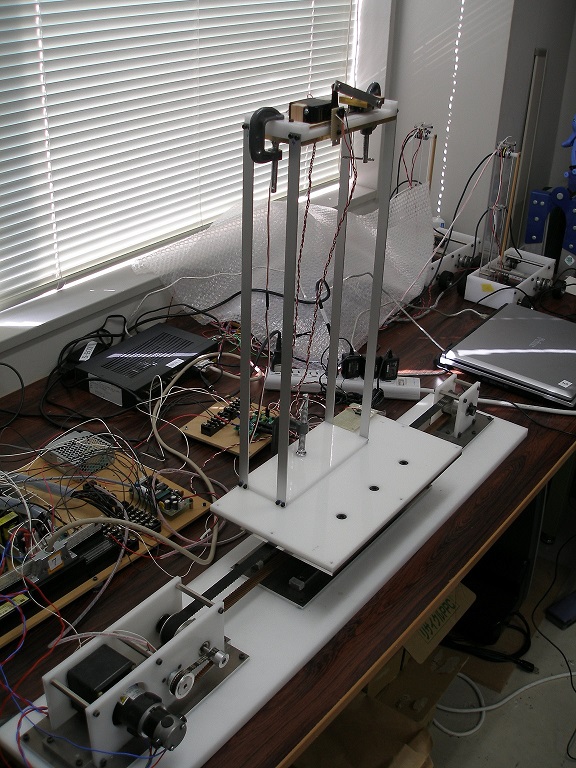
図39 1自由度構造系(2014.10.17)
付加質量駆動用アクチュエータ:双葉電子工業 スタンダードアナログサーボ
S3003,トライステート PICアクチュエータキット
サーボ出力軸角変位角検出用センサー:アルプス電気抵抗式ポジションセンサー RDC501015A
天板加速度検出用センサー:秋月電気通商 3軸加速度センサモジュール KXR94-2050
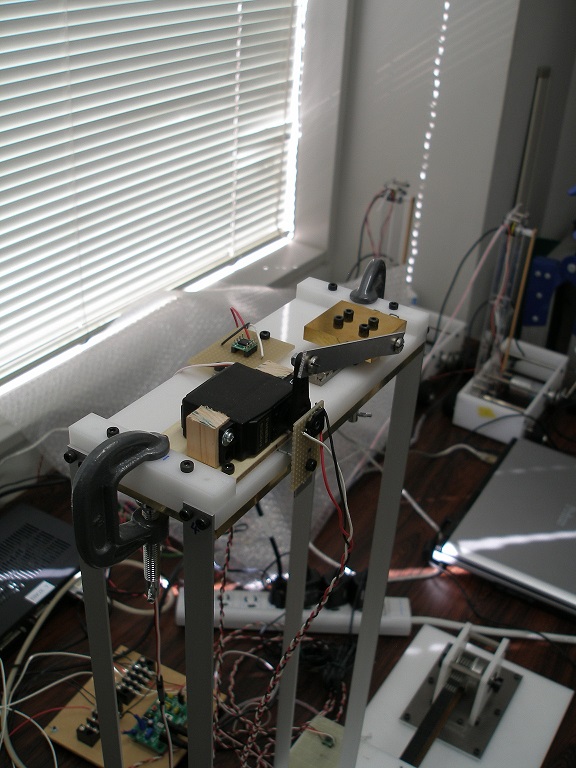
図40 1自由度構造系
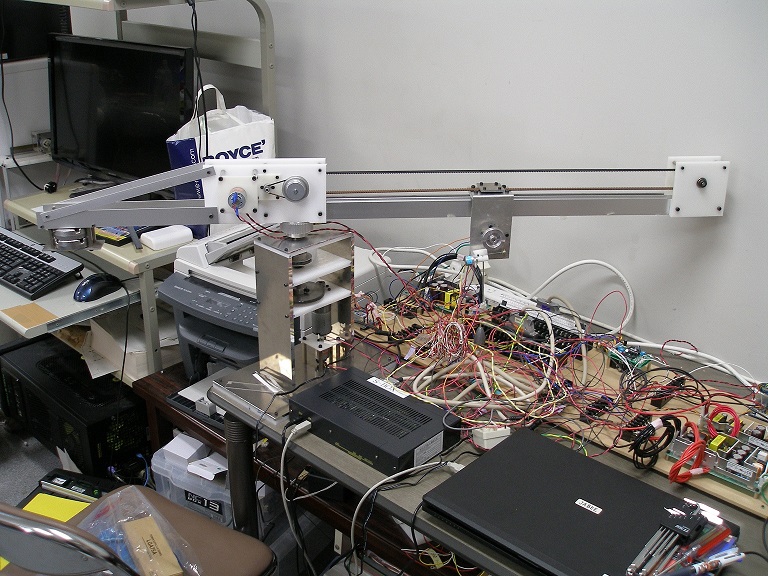
図41 タワークレーン系(2014.11.7)
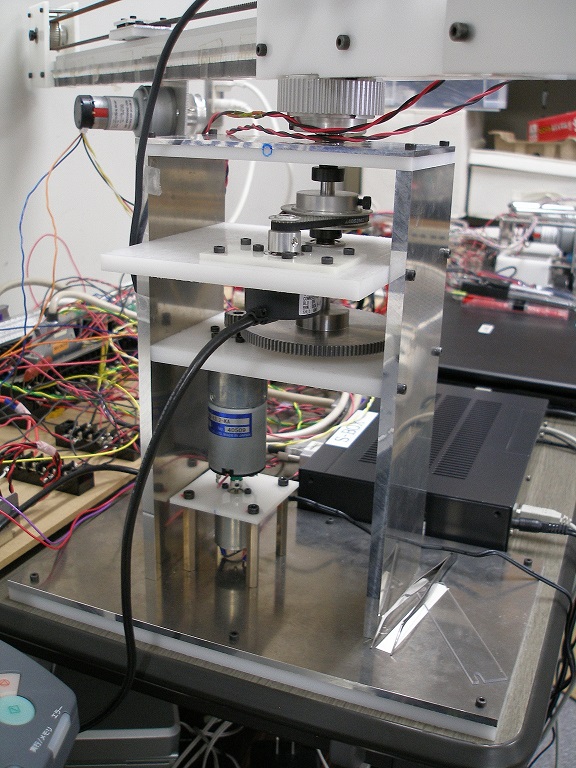
図42 タワークレーン系
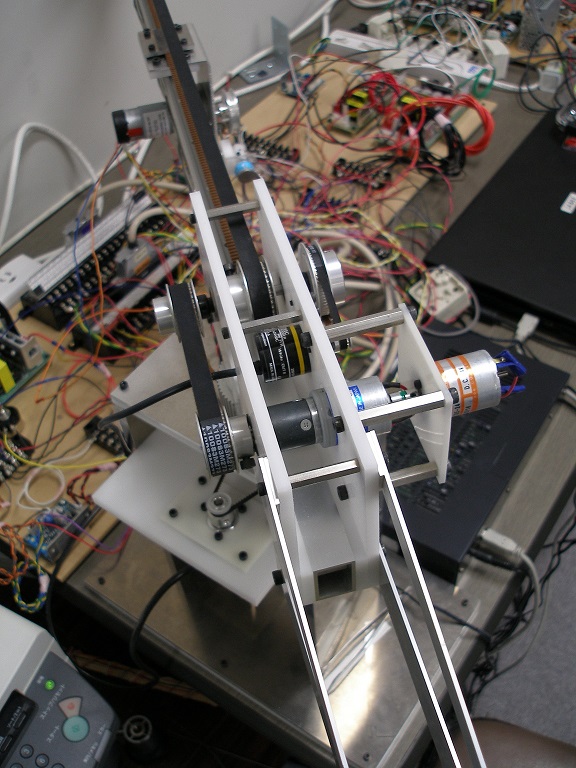
図42 タワークレーン系
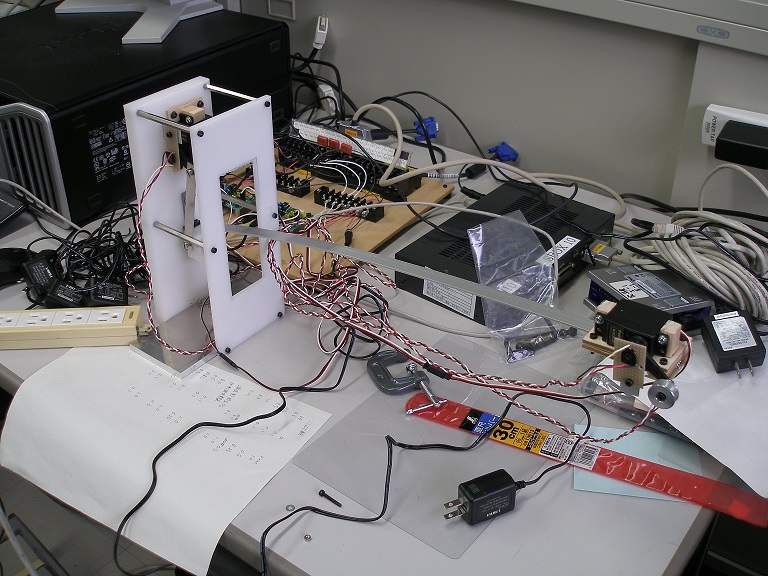
図43 フレキシブルビーム系(RTAC)(2014.12.5)
付加質量およびビーム駆動用アクチュエータ:双葉電子工業 スタンダードアナログサーボ
S3003,トライステート PICアクチュエータキット
サーボ出力軸角変位角検出用センサー:アルプス電気抵抗式ポジションセンサー RDC501015A
ビーム加速度検出用センサー:秋月電気通商 3軸加速度センサモジュール KXR94-2050
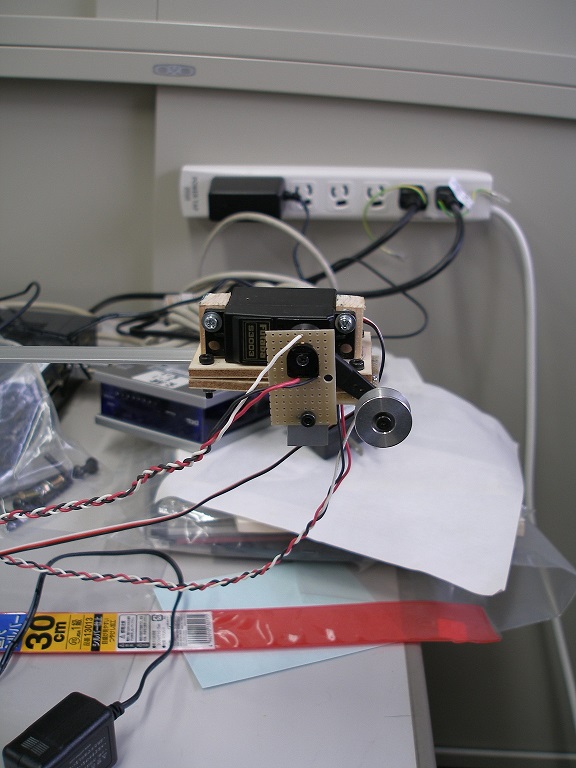
図44 フレキシブルビーム系(RTAC)
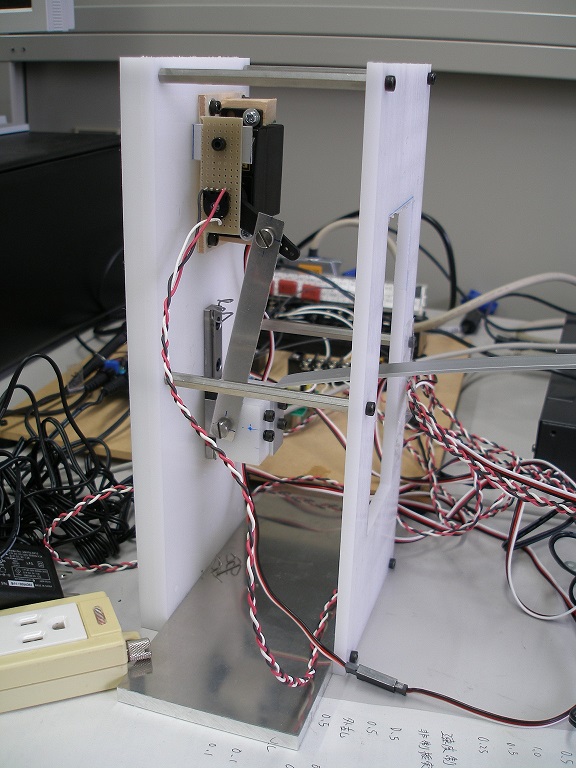
図45 フレキシブルビーム系(RTAC)
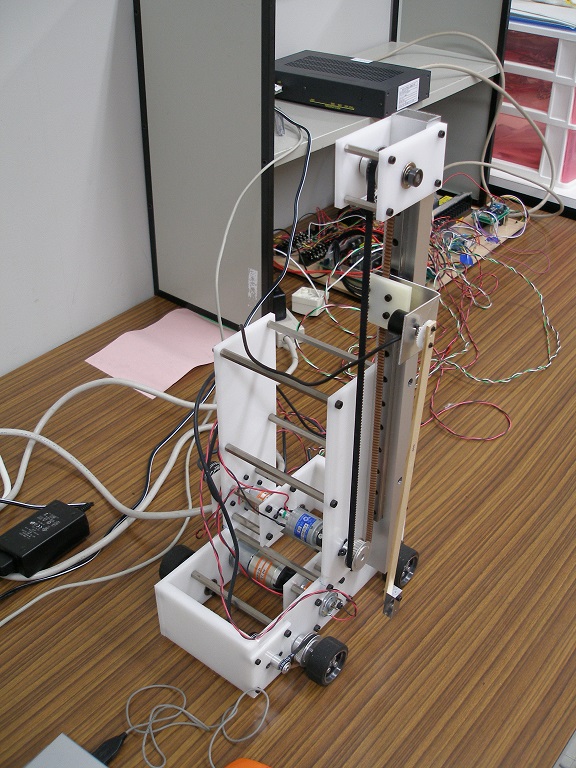
図46 支点鉛直変動型クレーン系(2015.1.9)
台車駆動用ギヤドDCモータ:スリーピース
TP-3640C-KM-18-S10-24,モータドライバ:スリーピース TPDR-26,DCタコジェネレータの代用品:スリーピース TP-2732E-24
支点駆動用ギヤドDCモータ:ツカサ電工 TG-47G-FU-23-KB,24V,モータドライバ:ツカサ電工 TCP-S30-300,DCタコジェネレータの代用品:スリーピース TP-2732E-24
台車変位検出用ロータリーエンコーダ:オムロン E6A2-CW5C
500P/R 0.5M(4逓倍で使用)
振り子角変位検出用ロータリーエンコーダ:マイクロテック・ラボラトリー MES-12-2048PC(4逓倍で使用)
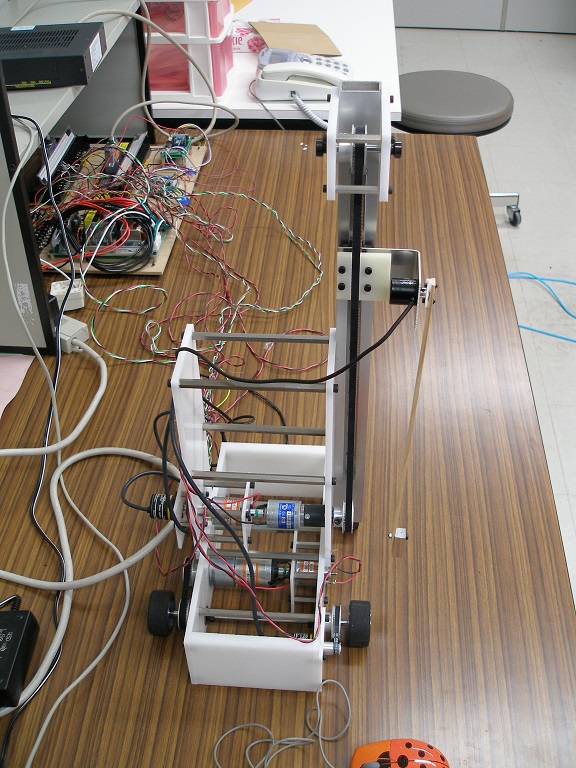
図47 支点鉛直変動型クレーン系
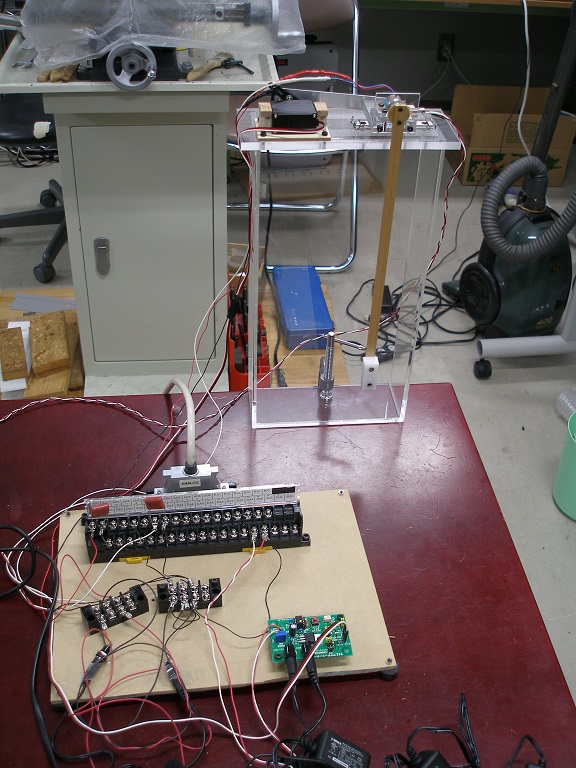
図48 支点水平移動型振り子系(2015.1.9)
支点駆動用アクチュエータ:双葉電子工業 スタンダードアナログサーボ
S3003,トライステート PICアクチュエータキット
支点変位検出用センサー:アルプス電気抵抗式ポジションセンサー RDC10320RB
振り子角変位検出用センサー:緑測器 無接触型回転角度センサ CP-2UN
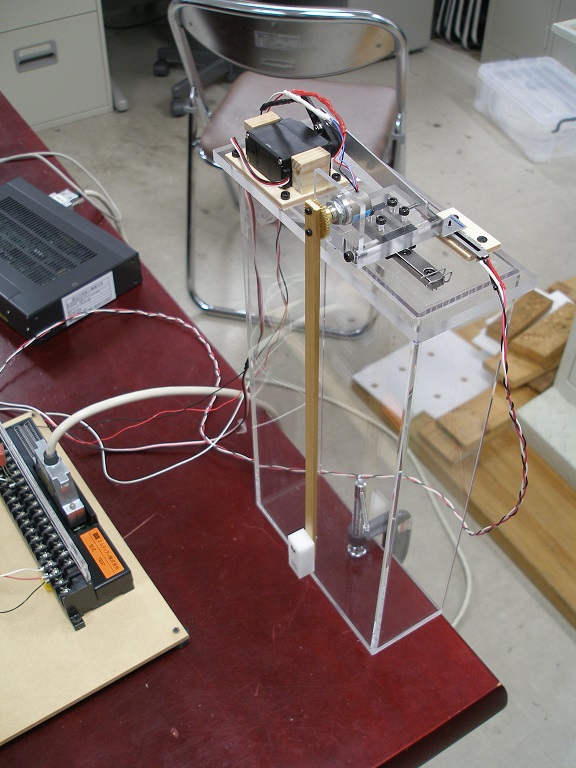
図49 支点水平移動型振り子系