本研究室で設計製作している実験装置などを紹介します。
図1 倒立振子実験装置+Arduino Due(2022.5.6) 2022年3月に製作した倒立振子系にジャイロセンサ―を取り付けました。
駆動用ギヤドDCモータ:ツカサ電工 TG-47H-SV-50-HB,24V
モータドライバ:Cytron CYTRON-MD10C
支点位置検出用ロータリーエンコーダ:オムロン E6A2-CW3C 500P/R 0.5M(4逓倍で使用)
振り子角検出用ロータリーエンコーダ:マイクロテックラボラトリー MES-12-2048PC(4逓倍で使用)
ジャイロセンサ―:近藤科学 KRG-4
モータドライバ用レギュレータ電源:TDK-Lambda ZWS150BAF-24
ACアダプター:ユニファイブ
UN110-0520-PL03B,UN110-3320-EIAJ-2
POM板は レーザー加工機 Epilog Mini24-60Wで加工,CADソフト RootPro CAD 9
アルミ合金板はCNCフライス盤 オリジナルマインド KitMill
RZ300で加工,CAD/CAMソフト Autodesk Fusion 360
実験動画1
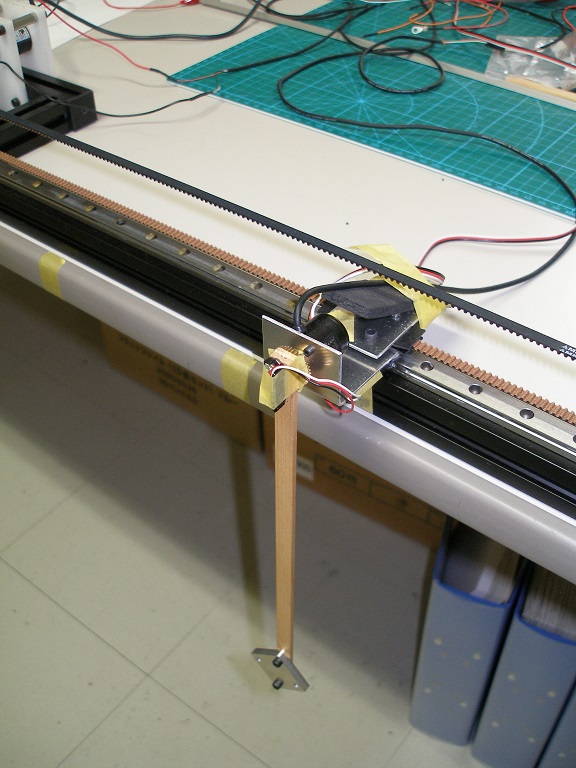
図2 倒立振子実験装置+Arduino Due
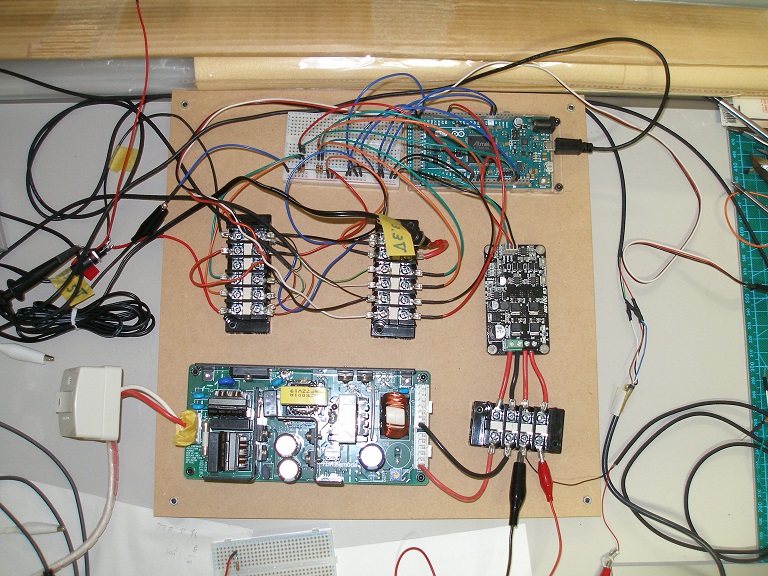
図3 倒立振子実験装置+Arduino Due
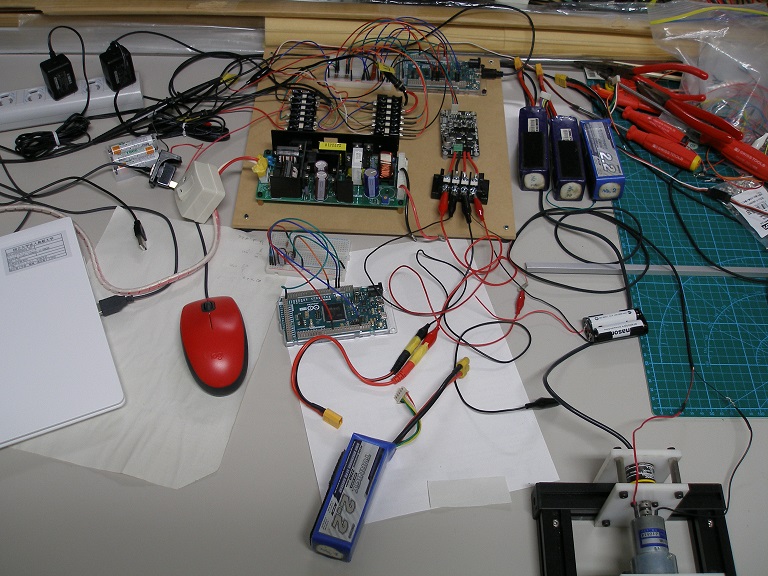
図4 倒立振子実験装置+Arduino
Due(2022.5.12) ジャイロセンサ―のノイズ対策のため、モータドライバとジャイロセンサ―の電源をレギュレータ電源からバッテリーに交換しました。
モータドライバ用バッテリー: リポバッテリー Turnigy 14.8V, 2200mAh, 40C
ジャイロセンサ―用バッテリー:
単3形充電式ニッケル水素電池 1.2V, 1900mAh, 3個直列結合
実験動画2
実験動画3

図5 倒立振子実験装置+Arduino Due(2022.5.22) 振り子角をポテンショメータで測定して実験しました。
駆動用ギヤドDCモータ:ツカサ電工 TG-47H-SV-50-HB,24V
モータドライバ:Cytron CYTRON-MD10C
支点位置検出用ロータリーエンコーダ:オムロン E6A2-CW3C 500P/R 0.5M(4逓倍で使用)
振り子角検出用ポテンショメータ:緑測器
無接触型回転角度センサ CP-2UN
モータドライバ用バッテリー: リポバッテリー Turnigy 14.8V, 2200mAh, 40C
ジャイロセンサ―用バッテリー:
単3形充電式ニッケル水素電池 1.2V, 1900mAh, 3個直列結合
ロータリーエンコーダ用ACアダプター:ユニファイブ
UN110-0520-PL03B(本体電源用),UN110-3320-EIAJ-2(オープンコレクタ回路プルアップ用)
実験動画
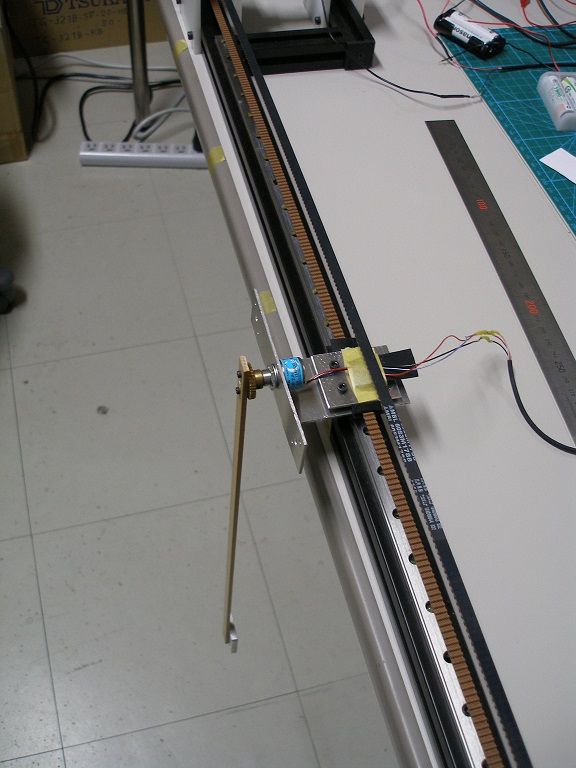
図6 倒立振子実験装置+Arduino Due
図7 倒立振子実験装置+Arduino Due
図8 倒立振子実験装置+Arduino Due
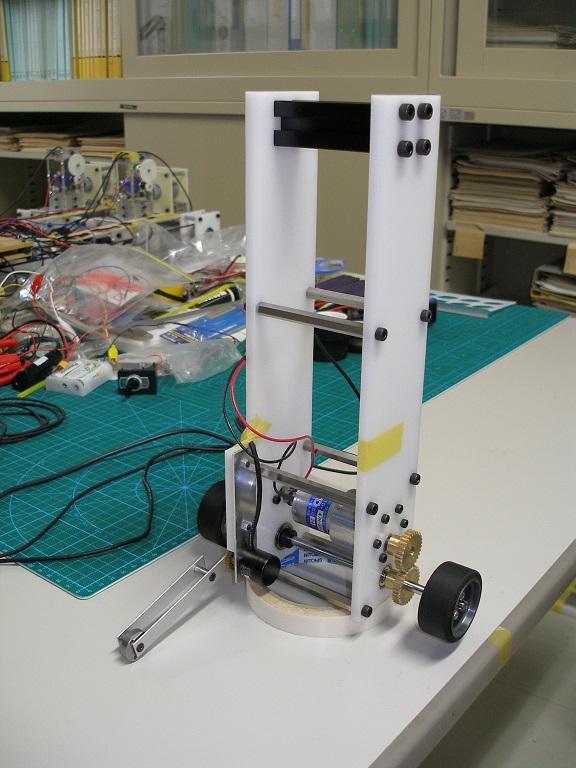
図9 二輪倒立振子系実験装置+Arduino Due(2022.8.25) 2022年3月に改良した実験装置で、車輪をタミヤ
ナロータイヤセット(直径58mm)から、オリジナルマインド タイヤホイールセット(直径45.2mm)に交換しました。
駆動用ギヤドDCモータ:ツカサ電工
TG-47H-SV-50-HB,24V
モータドライバ:Cytron CYTRON-MD10C
モータシャフト回転角検出用ロータリーエンコーダ:オムロン E6A2-CW3C 500P/R 0.5M(4逓倍で使用)
姿勢角検出用ロータリーエンコーダ:マイクロテックラボラトリー MES-12-2048PC(4逓倍で使用)
ACアダプター:ユニファイブ
UN110-1210-PL03B,UN110-0520-PL03B,UN110-3320-EIAJ-2
モータドライバ用レギュレータ電源:TDK-Lambda ZWS150BAF-24
POM板は レーザー加工機 Epilog
Mini24-60Wで加工,CADソフト RootPro CAD 9
ジュラルミン板はCNCフライス盤 オリジナルマインド KitMill
RZ300で加工,CAD/CAMソフト Autodesk Fusion 360
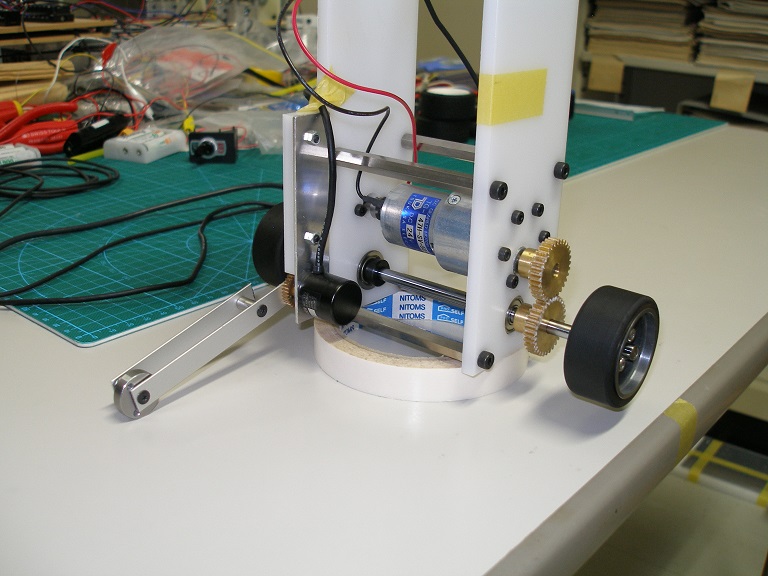
図10 二輪倒立振子系実験装置+Arduino Due
図11 二輪倒立振子系実験装置+Arduino Due
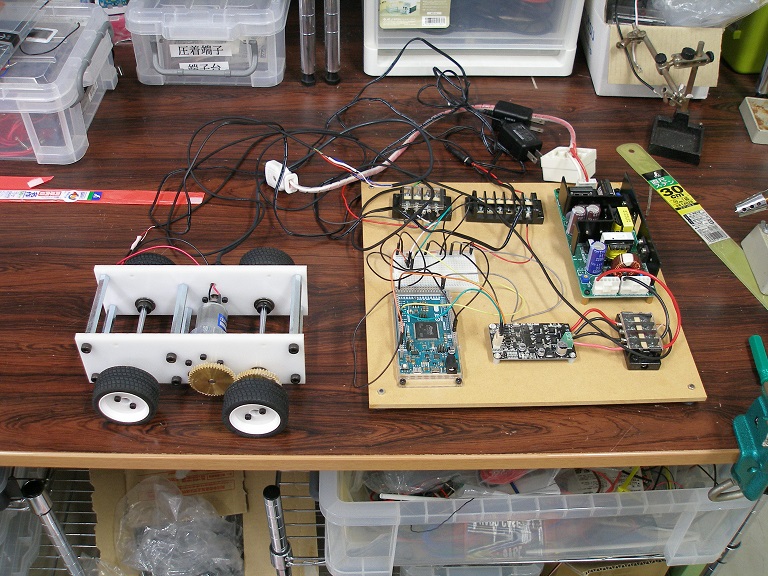
図12 台車系実験装置+Arduino
Due(2022.9.15) 総合理工学部のPBL科目の一つ「企業実践インターンシップB」(通年,2単位)の一課題として製作しました。
駆動用ギヤドDCモータ:ツカサ電工
TG-47H-SV-50-HB,24V
モータドライバ:Cytron CYTRON-MD10C
モータシャフト回転角検出用ロータリーエンコーダ:オムロン E6A2-CW3C 500P/R 0.5M(4逓倍で使用)
ACアダプター:ユニファイブ
UN110-0520-PL03B,UN110-3320-EIAJ-2
モータドライバ用レギュレータ電源:TDK-Lambda ZWS150BAF-24
POM板は レーザー加工機 Epilog
Mini24-60Wで加工,CADソフト RootPro CAD 9
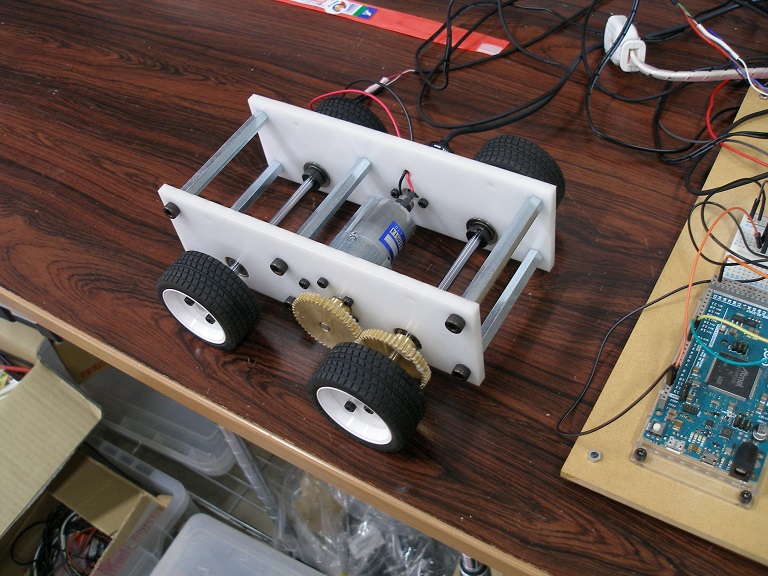
図13 台車系実験装置+Arduino Due
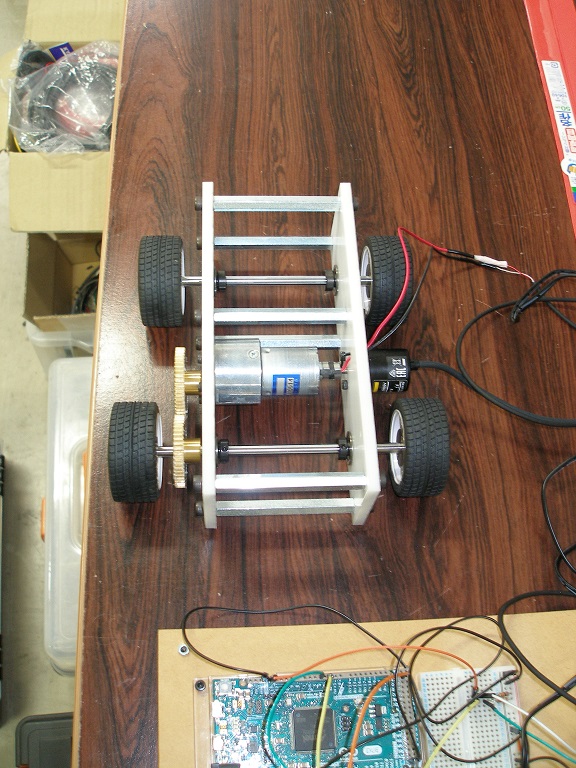
図14 台車系実験装置+Arduino Due
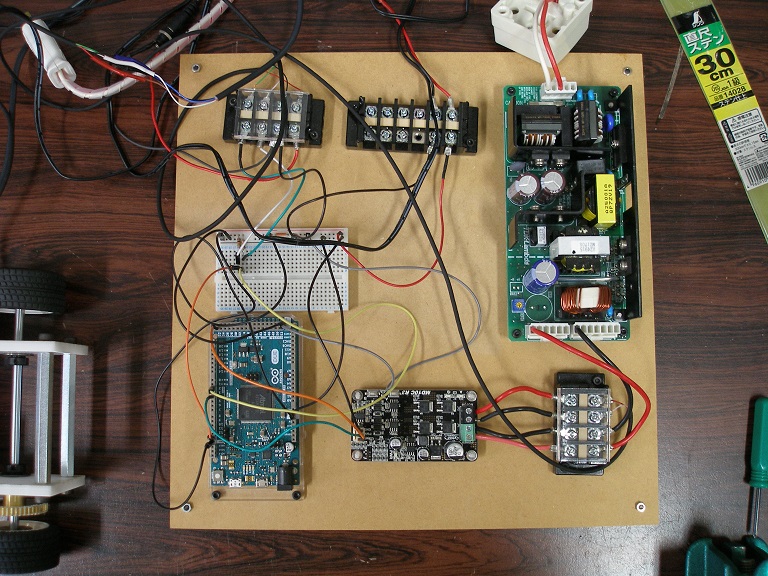
図15 台車系実験装置+Arduino Due

図16 倒立振子系実験装置+Arduino
Due(2022.9.15) 総合理工学部のPBL科目の一つ「企業実践インターンシップB」(通年,2単位)の一課題として製作した台車系実験装置を改造しました。
駆動用ギヤドDCモータ:ツカサ電工
TG-47H-SV-50-HB,24V
モータドライバ:Cytron CYTRON-MD10C
モータシャフト回転角検出用ロータリーエンコーダ:オムロン E6A2-CW3C 500P/R 0.5M(4逓倍で使用)
振り子角検出力ポテンショメータ:緑測器 CP-2UN
ACアダプター:ユニファイブ
UN110-0520-PL03B,UN110-3320-EIAJ-2
モータドライバ用電源:4セル(14.8V)リチウムポリマーバッテリ TURNIGY nano-tech 4 cell 2200mAh 35-70C
discharge
POM板は レーザー加工機 Epilog
Mini24-60Wで加工,CADソフト RootPro CAD 9
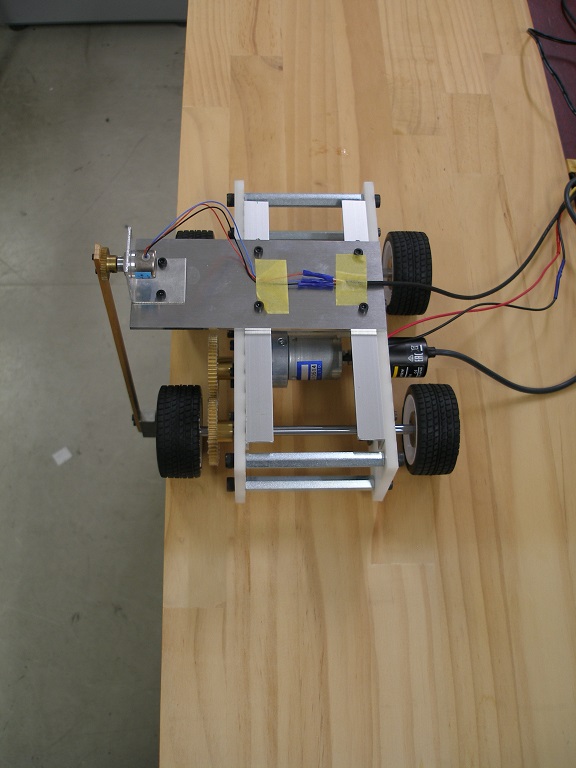
図17 倒立振子系実験装置+Arduino Due
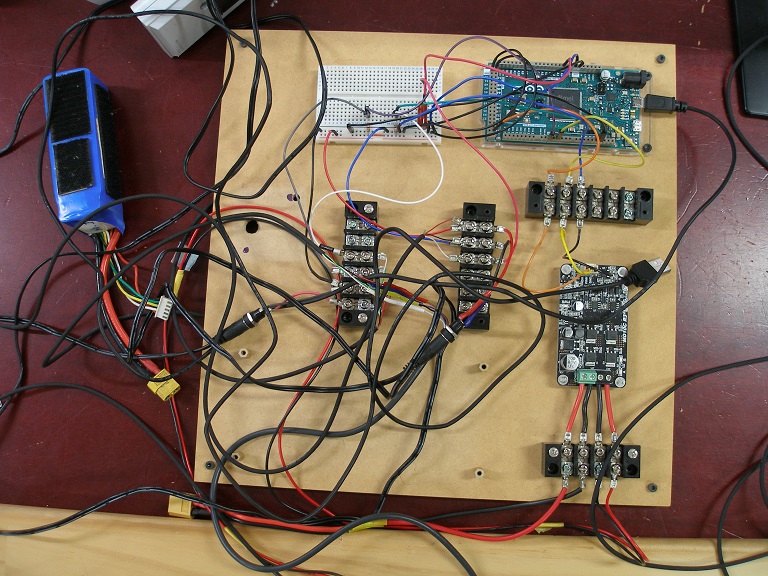
図18 倒立振子系実験装置+Arduino Due

図19 1自由度振動系+Arduino
Due(2022.9.18) 2020年10月に製作した実験装置を改造しました(ギヤドDCモータのギヤ比を1/20から1/50へ,モータドライバ用電源をレギュレータ電源からリチウムポリマーバッテリへ変更)。
プーリー駆動用DCモータ:ツカサ電工 TG-321B-SV-50-HB,24V
ばね上端位置検出用ロータリーエンコーダ:オムロン E6A2-CW3C
500P/R 0.5M(4逓倍で使用)
錘位置検出用距離センサ:北陽電機 レーザ距離センサ LX2-257AG
モータドライバ:Cytron
CYTRON-MD10C
モータドライバ用電源:4セル(14.8V)リチウムポリマーバッテリ TURNIGY nano-tech 4 cell
2200mAh 35-70C discharge
ACアダプター:ユニファイブ UN110-1210-PL03B,UN110-3320-EIAJ-2
POM板はレーザー加工機 Epilog Mini24-60Wで加工,CADソフト RootPro CAD 9
ジュラルミン板はCNCフライス盤
オリジナルマインド KitMill RZ300で加工,CAD/CAMソフト Autodesk Fusion 360
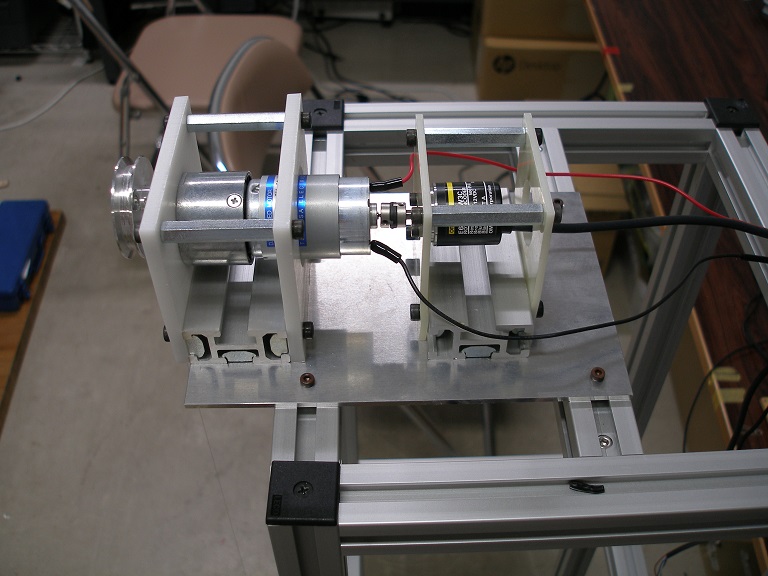
図20 1自由度振動系+Arduino Due

図21 1自由度振動系+Arduino Due
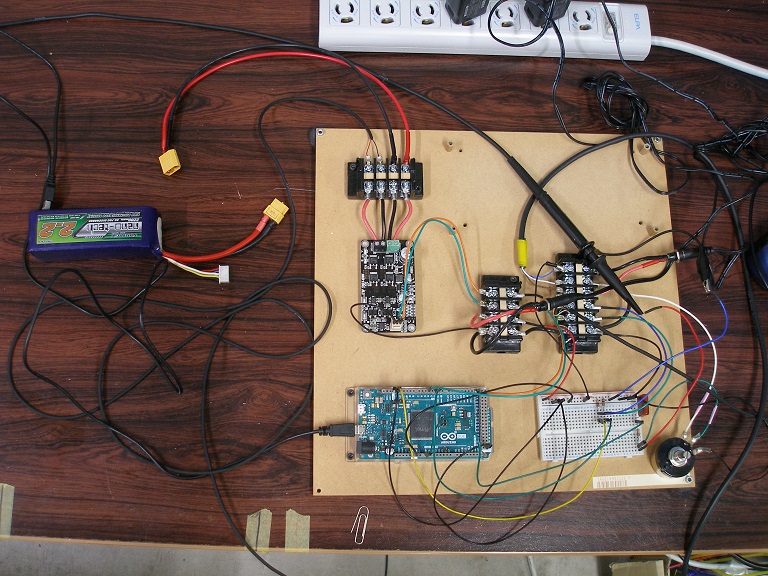
図22 1自由度振動系+Arduino Due

図23 タワークレーン系+Arduino
Due(2022.10.3) 2021年10月に製作した回転型倒立振子系の駆動部を利用してタワークレーン系を製作するための予備実験。
モーターのギヤ比を1/20から1/50へ変更。
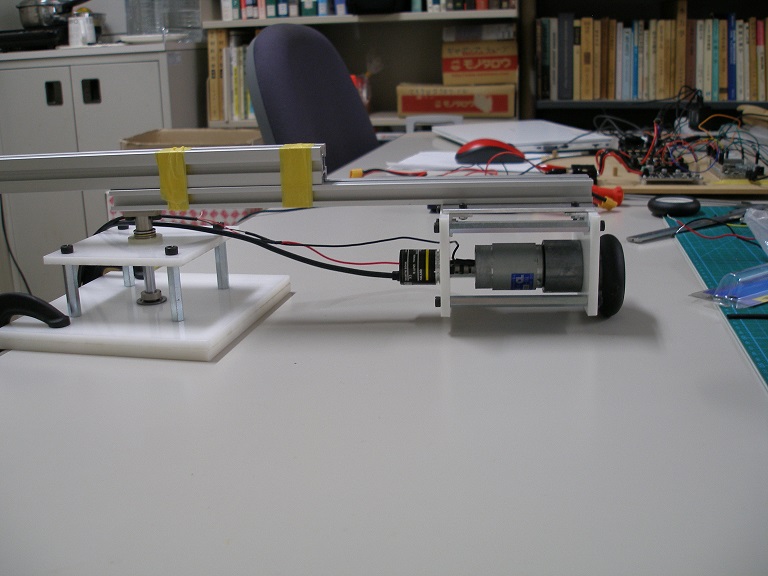
図24 タワークレーン系+Arduino Due
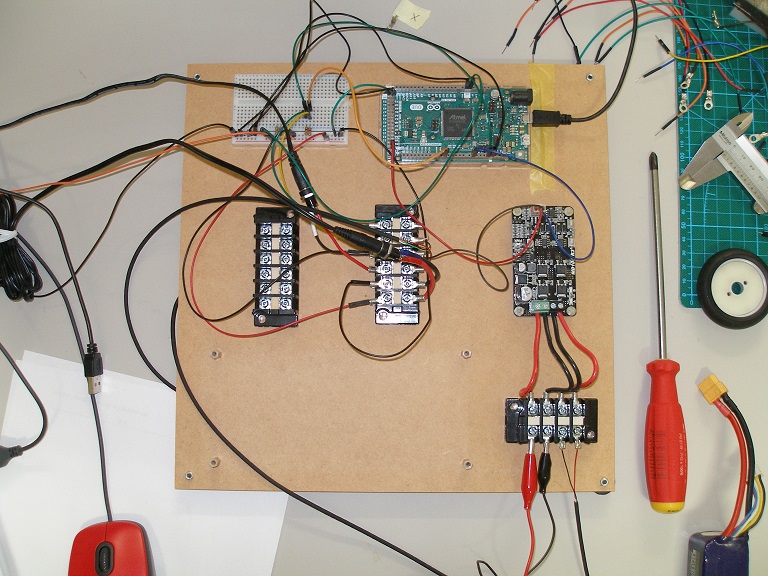
図25 タワークレーン系+Arduino Due

図26 タワークレーン系+Arduino
Due(2022.10.11) 2018年11月に製作した門型クレーン系の巻上げ部を利用してタワークレーン系を製作するための予備実験用。
駆動用モータをアナログRCサーボ(ローテーションサーボ)GWS S35 STDからツカサ電工ギヤドDCモータ TG-101C-GU-85.1-KB,
24Vに変更。
アルミプーリー16mm×3mmをアルミプーリー20mm×3mmに変更。
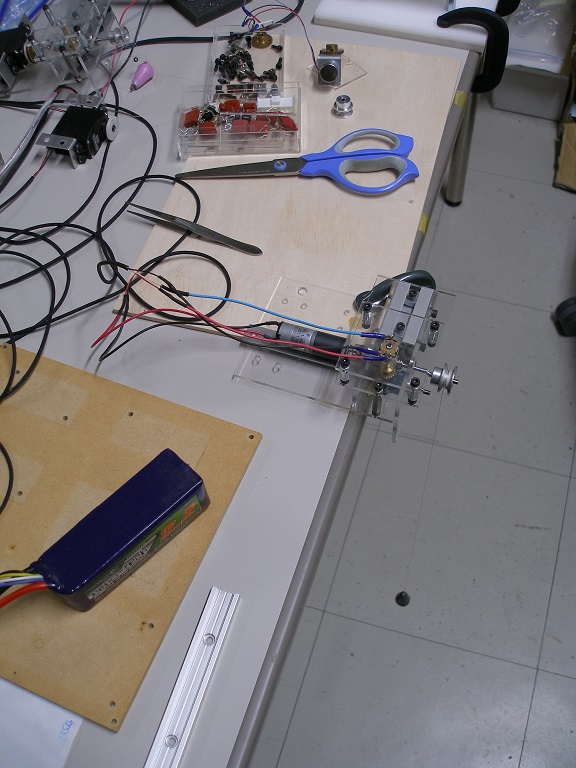
図27 タワークレーン系+Arduino Due
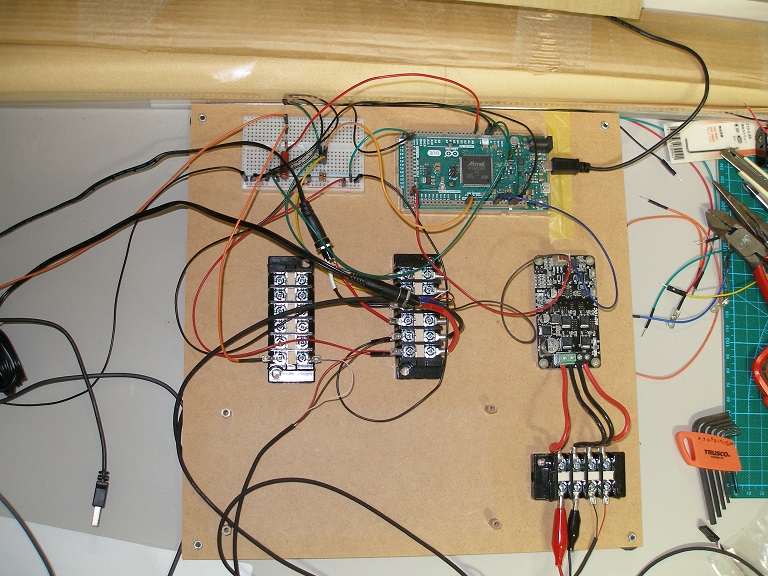
図28 タワークレーン系+Arduino Due
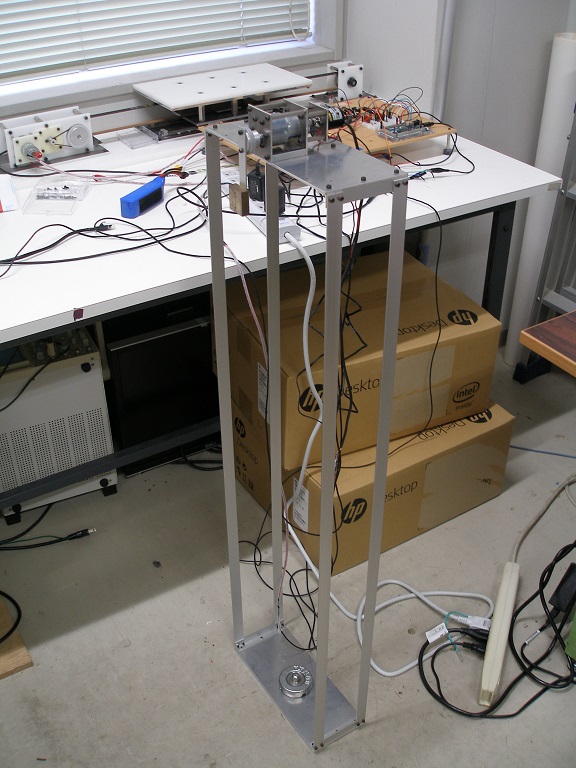
図29 回転型AMDを持つ1自由度構造系(RTAC)+Arduino
Due(2022.10.23) 2019年11月に製作した1自由度構造系でAMD部分を並進型から回転型に変更。駆動系の電源をレギュレータ電源からバッテリーに変更。
AMD部の駆動用ギヤドDCモータ:ツカサ電工 TG-47H-SV-100-HB,24V
モータドライバ:Cytron CYTRON-MD10C
回転質量の角度計測用ロータリーエンコーダ:オムロン E6A2-CW3C 500P/R 0.5M(4逓倍で使用)
フロアーの加速度計測用センサ:秋月電子
3軸加速度センサモジュールKXR94-2050
モータドライバ用電源:4セル(14.8V)リチウムポリマーバッテリ Hyperion 4S
2100mAh 35-50C discharge
ACアダプター:ユニファイブ UN110-0520-PL03B,UN110-3320-EIAJ-2
POM板は レーザー加工機 Epilog Mini24-60Wで加工,CADソフト RootPro CAD 9
ジュラルミン板はCNCフライス盤
オリジナルマインド KitMill RZ300で加工,CAD/CAMソフト Autodesk Fusion 360
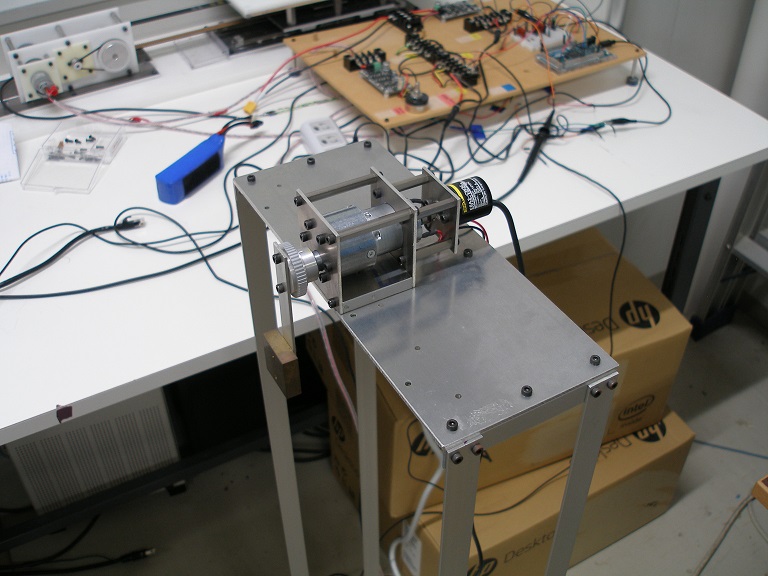
図30 回転型AMDを持つ1自由度構造系(RTAC)+Arduino Due
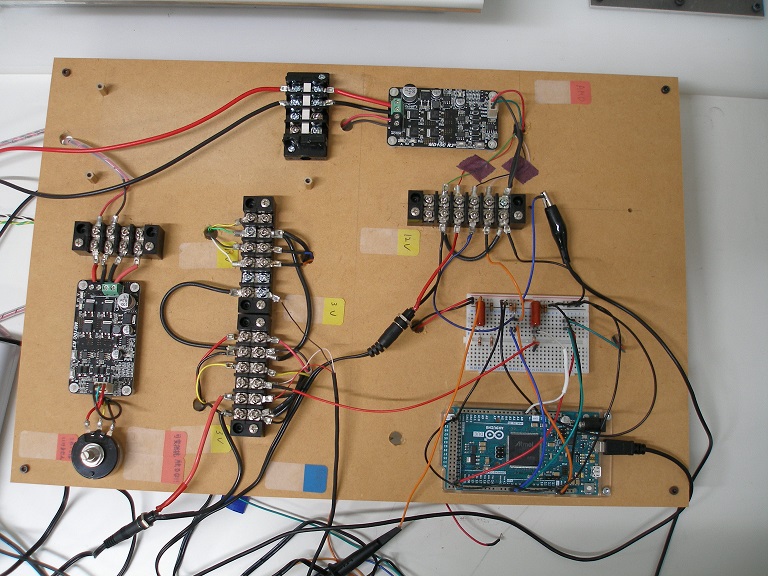
図31 回転型AMDを持つ1自由度構造系(RTAC)+Arduino Due
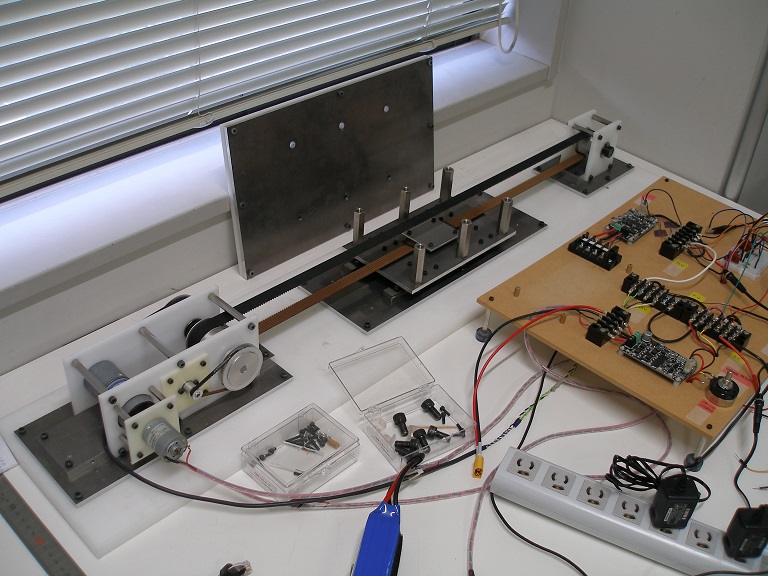
図32 振動台+Arduino
Due(2022.10.29) 2018年2月に改良した振動台を再利用のため修理・調整しました。(リニアガイドの交換,電源をスイッチングレギュレータ電源からリチウムポリマーバッテリに変更等)
駆動用ギヤドDCモータ:ツカサ電工 TG-85R-SU-23.5-KB,12V
モータドライバ:Cytron CYTRON-MD10C
DCタコジェネレータの代用品:スリーピース TP-2732E-24
台車位置検出用ロータリーエンコーダ:オムロン E6A2-CW5C 500P/R
0.5M(4逓倍で使用)
モータドライバ用電源:4セル(14.8V)リチウムポリマーバッテリ Hyperion 4S
2100mAh 35-50C discharge
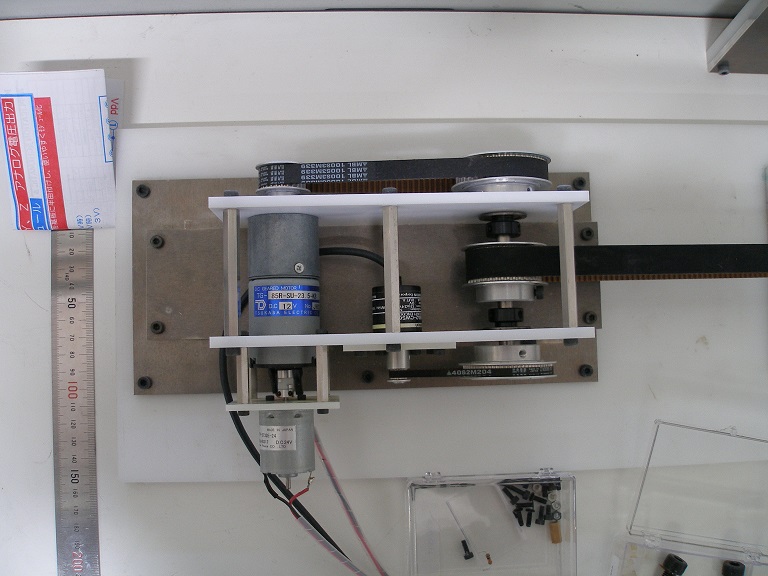
図33 振動台+Arduino Due
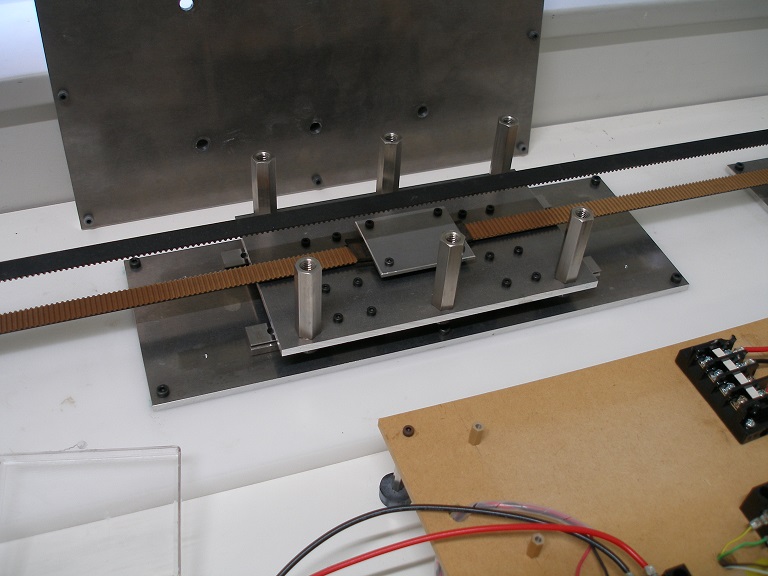
図34 振動台+Arduino Due
図35 振動台+Arduino Due
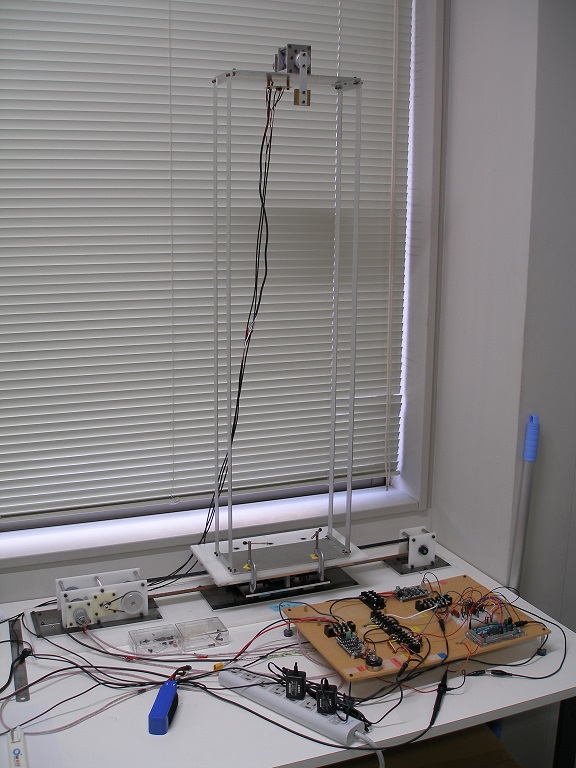
図36 回転型AMDを持つ1自由度構造系(RTAC)+振動台+Arduino Due(2022.10.30) 上記二つの実験装置を合わせました。
AMD部の駆動用ギヤドDCモータ:ツカサ電工 TG-47H-SV-100-HB,24V
モータドライバ:Cytron CYTRON-MD10C
回転質量の角度計測用ロータリーエンコーダ:オムロン E6A2-CW3C 500P/R 0.5M(4逓倍で使用)
フロアーの加速度計測用センサ:秋月電子
3軸加速度センサモジュールKXR94-2050
台車駆動用ギヤドDCモータ:ツカサ電工 TG-85R-SU-23.5-KB,12V
モータドライバ:Cytron CYTRON-MD10C
DCタコジェネレータの代用品:スリーピース TP-2732E-24
台車位置検出用ロータリーエンコーダ:オムロン E6A2-CW5C 500P/R
0.5M(4逓倍で使用)
モータドライバ用電源:4セル(14.8V)リチウムポリマーバッテリ Hyperion 4S
2100mAh 35-50C discharge
ACアダプター:ユニファイブ UN110-0520-PL03B,UN110-3320-EIAJ-2
POM板は レーザー加工機 Epilog Mini24-60Wで加工,CADソフト RootPro CAD 9
ジュラルミン板はCNCフライス盤
オリジナルマインド KitMill RZ300で加工,CAD/CAMソフト Autodesk Fusion 360

図37 回転型AMDを持つ1自由度構造系(RTAC)+振動台+Arduino Due
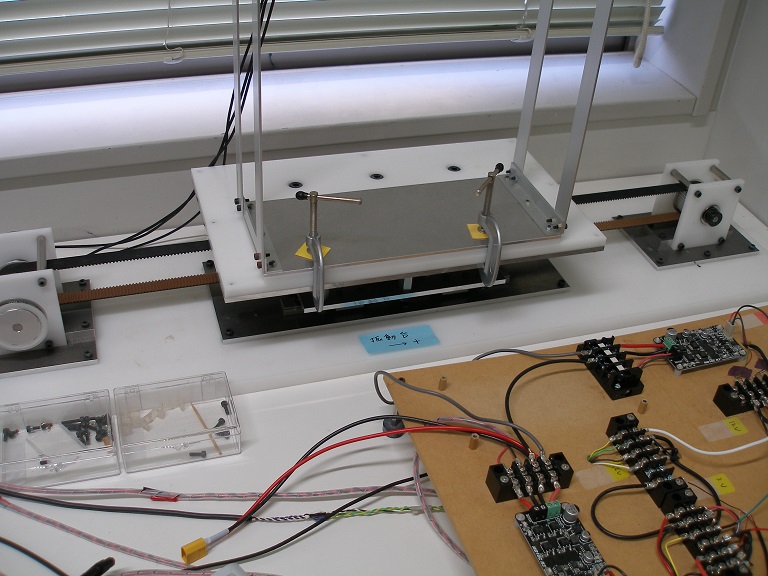
図38 回転型AMDを持つ1自由度構造系(RTAC)+振動台+Arduino Due
図39 回転型AMDを持つ1自由度構造系(RTAC)+振動台+Arduino Due
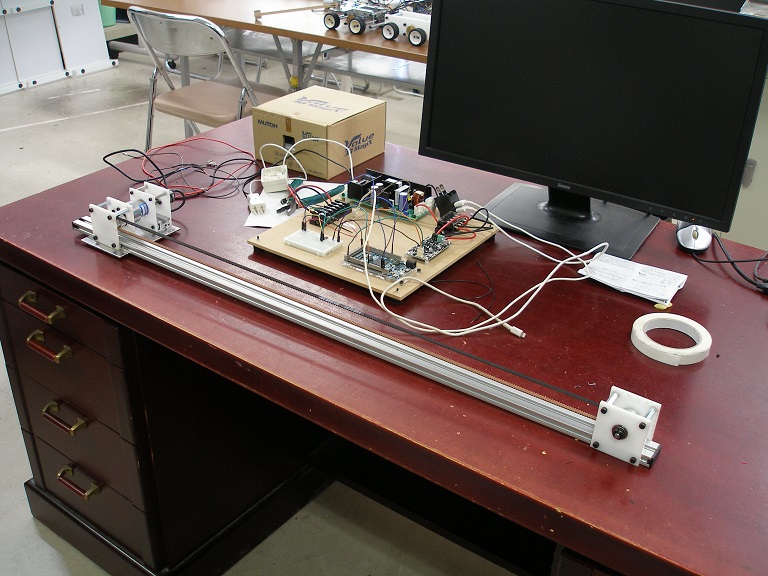
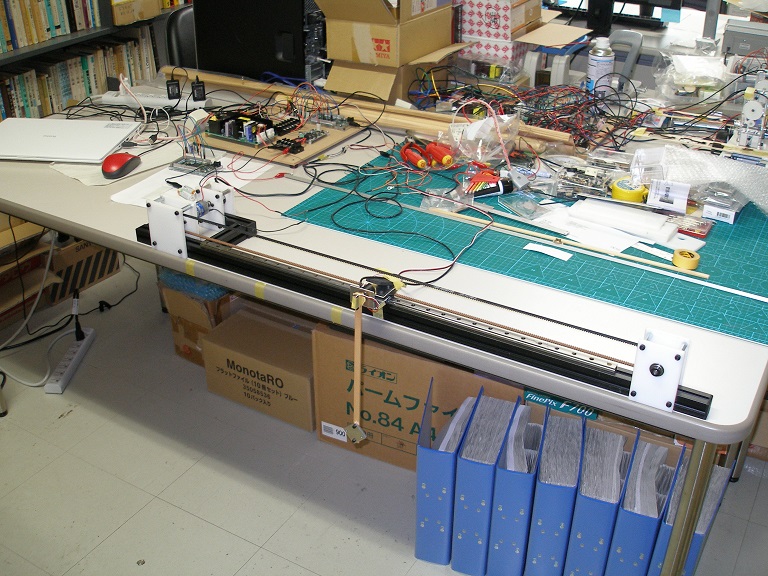
図40 プーリーベルト駆動系+Arduino Due(2022.11.6) 総合理工学部のPBL科目の一つ「企業実践インターンシップB」(通年,2単位)の一課題として製作中。
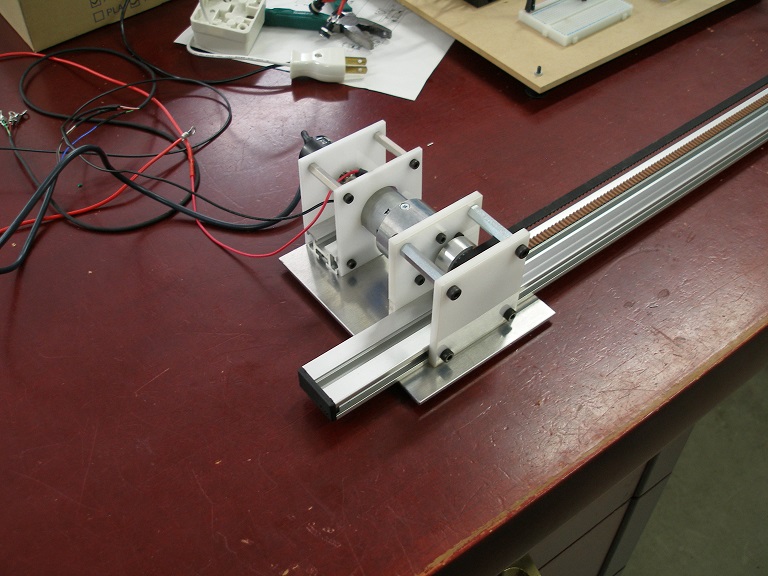
図41 プーリーベルト駆動系+Arduino Due

図42 プーリーベルト駆動系+Arduino Due

図43 プーリーベルト駆動系+Arduino
Due(2022.11.28) 総合理工学部のPBL科目の一つ「企業実践インターンシップB」(通年,2単位)の一課題として製作しました。
駆動用ギヤドDCモータ:ツカサ電工
TG-47H-SV-50-HB,24V
モータドライバ:Cytron CYTRON-MD10C
モータシャフト回転角検出用ロータリーエンコーダ:オムロン E6A2-CW3C 500P/R 0.5M(4逓倍で使用)
ACアダプター:ユニファイブ
UN110-0520-PL03B,UN110-3320-EIAJ-2
モータドライバ用レギュレータ電源:TDK-Lambda ZWS150BAF-24
POM板は レーザー加工機 Epilog
Mini24-60Wで加工,CADソフト RootPro CAD 9
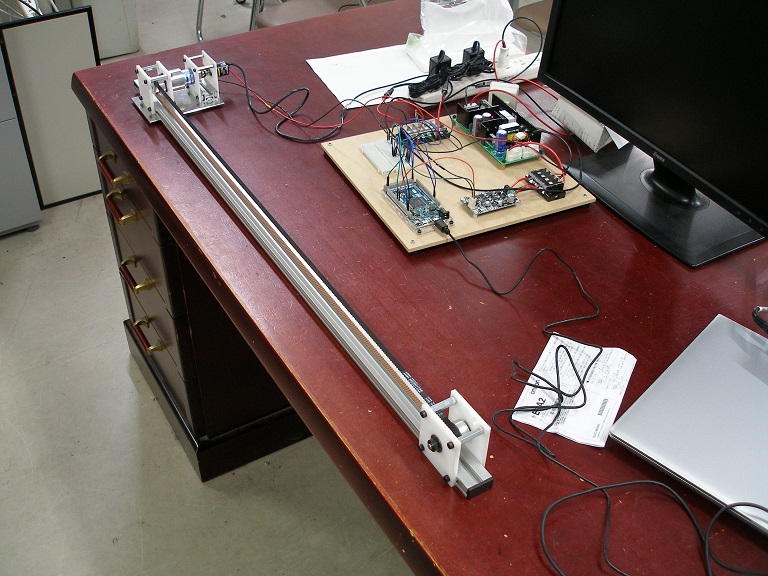
図44 プーリーベルト駆動系+Arduino Due
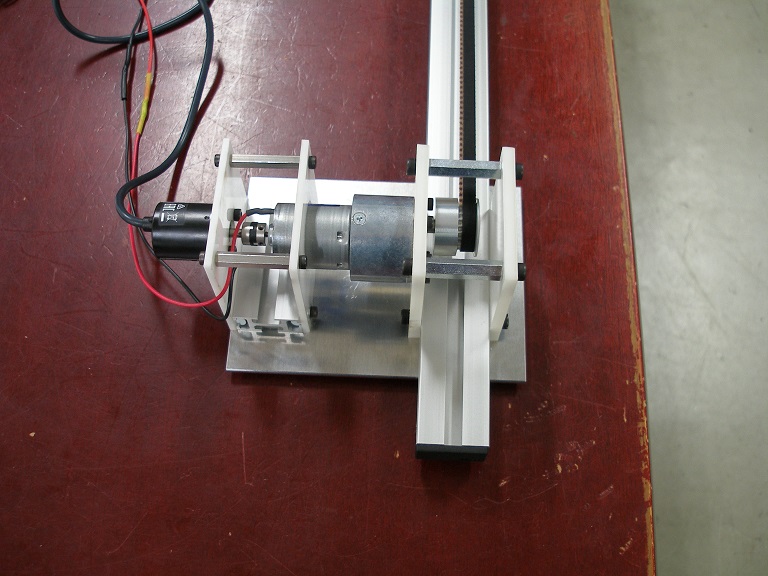
図45 プーリーベルト駆動系+Arduino Due
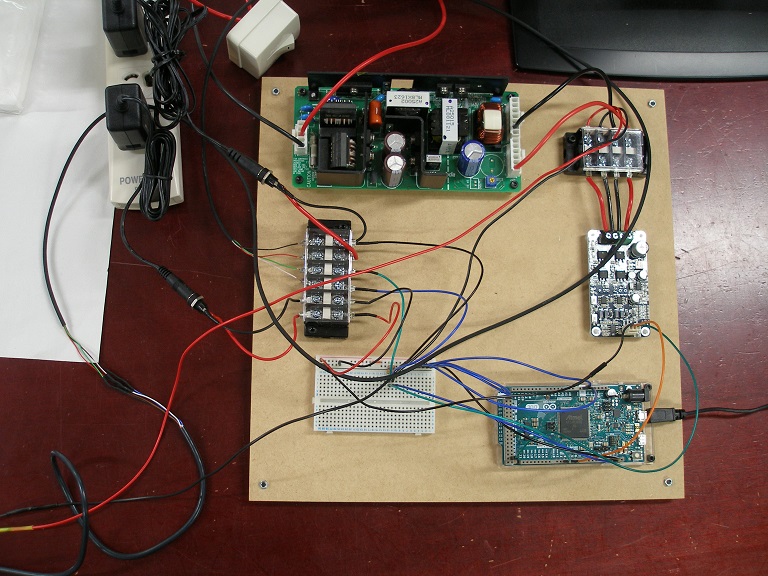
図46 プーリーベルト駆動系+Arduino Due
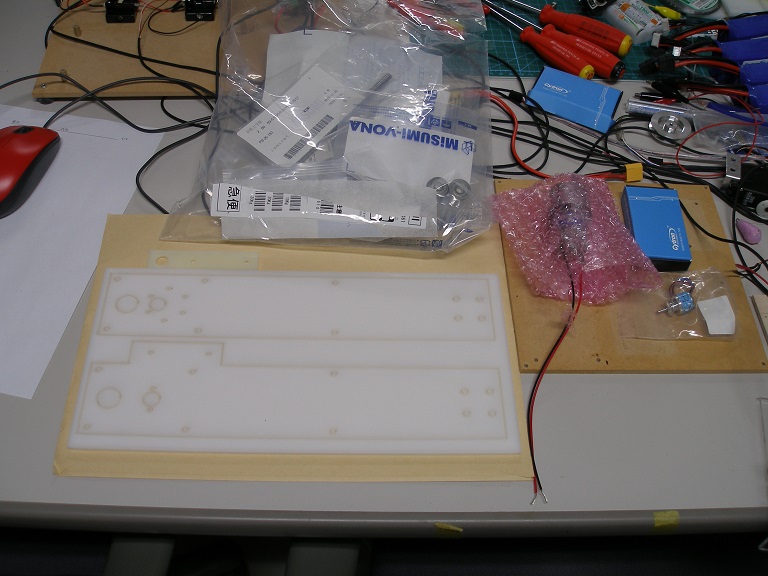
図47 二輪倒立振子系部品(2022.11.28) 二連二輪倒立振子系の実験のためにもう一台製作予定。POM板はレーザー加工機で加工済み。

図48 倒立振子系(台車-振り子系)+Arduino
Due(2022.12.12) 2020年9月に製作した装置を改良しました(ギヤドモータの減速比を1/33から1/50に変更,タイヤをタミヤ製のものからオリジナルマインド製のものに交換,モータドライバ用電源を24Vスイッチングレギュレータ電源から4セル(14.8V)リチウムポリマーバッテリに交換)。
台車駆動用ギヤドDCモータ:ツカサ電工 TG-47H-SV-50-HB,24V
モータドライバ:Cytron CYTRON-MD10C
台車位置検出用ロータリーエンコーダ:オムロン E6A2-CW3C 500P/R 0.5M(4逓倍で使用)
振り子角検出用ポテンショメータ:緑測器
CP-2UN
ACアダプター:ユニファイブ UN110-1210-PL03B,UN110-3320-EIAJ-2
モータドライバ用レギュレータ電源:4セル(14.8V)リチウムポリマーバッテリ Hyperion 4S 2100mAh 35-50C discharge
アクリル板は レーザー加工機 Epilog
Mini24-60Wで加工,CADソフト RootPro CAD 9
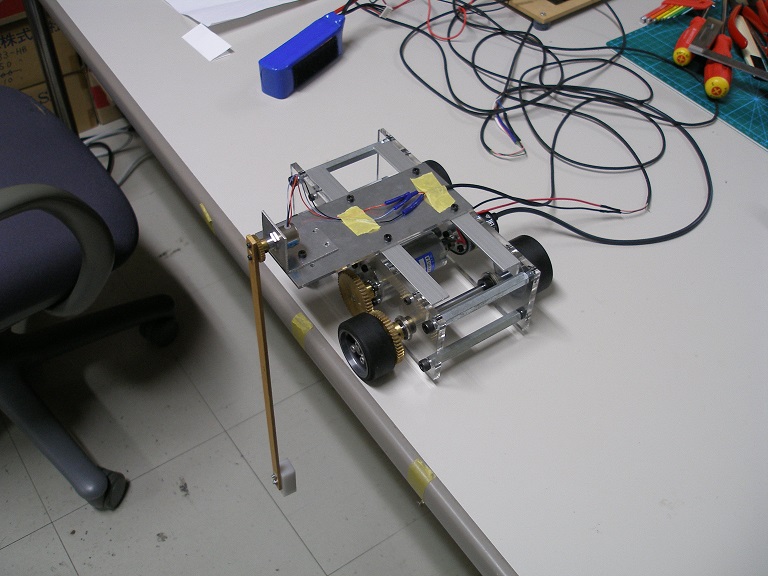
図49 倒立振子系(台車-振り子系)+Arduino Due
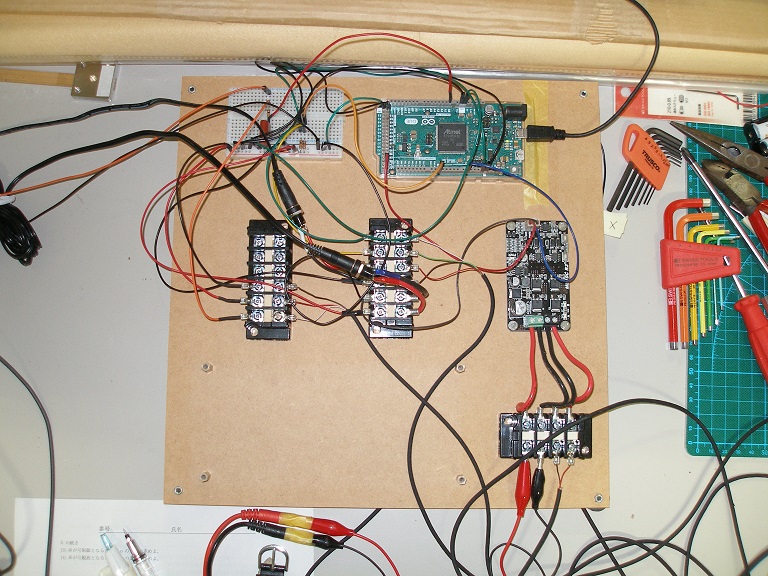
図50 倒立振子系(台車-振り子系)+Arduino Due
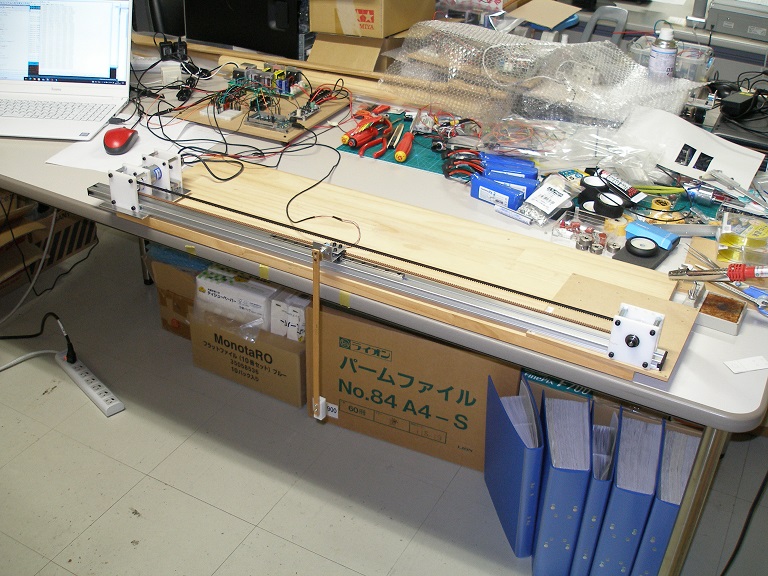
図51 倒立振子系(プーリーベルト駆動)+Arduino
Due(2022.12.19) 「企業実践インターンシップB」(通年,2単位)の一課題として後期に製作したプーリーベルト駆動系に振り子部を取り付けました。
駆動用ギヤドDCモータ:ツカサ電工
TG-47H-SV-50-HB,24V
モータドライバ:Cytron CYTRON-MD10C
モータシャフト回転角検出用ロータリーエンコーダ:オムロン E6A2-CW3C 500P/R 0.5M(4逓倍で使用)
振り子角検出用ポテンショメータ:緑測器
CP-2UN
ACアダプター:ユニファイブ
UN110-0520-PL03B,UN110-3320-EIAJ-2
モータドライバ用レギュレータ電源:コーセル LFP240F-24-Y
POM板は レーザー加工機 Epilog
Mini24-60Wで加工,CADソフト RootPro CAD 9
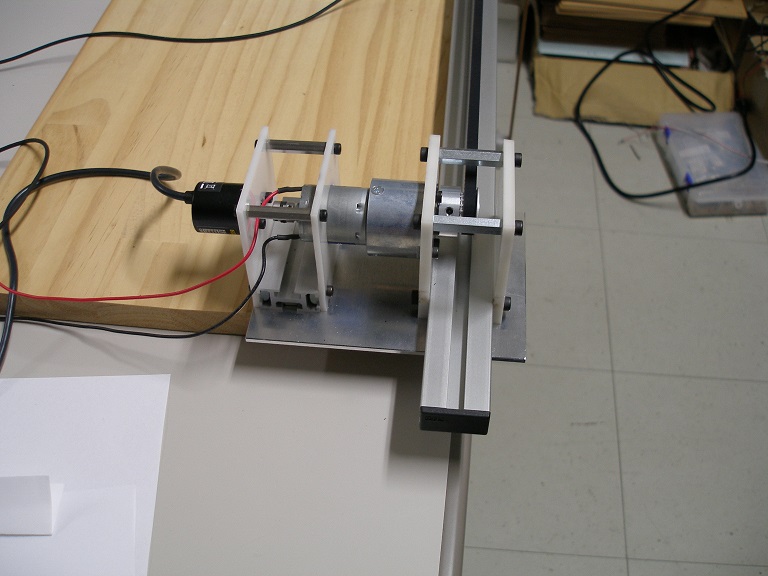
図52 倒立振子系(プーリーベルト駆動)+Arduino Due

図53 倒立振子系(プーリーベルト駆動)+Arduino Due
図54 倒立振子系(プーリーベルト駆動)+Arduino Due

図55 倒立振子系(プーリーベルト駆動)+Arduino
Due(2023.1.3) 「企業実践インターンシップB」(通年,2単位)の一課題として後期に製作したプーリーベルト駆動系に振り子部を取り付けました。
駆動用ギヤドDCモータ:ツカサ電工
TG-47H-SV-(10, 20, 33 or 50)-HB,24V
モータドライバ:Cytron CYTRON-MD10C
モータシャフト回転角検出用ロータリーエンコーダ:オムロン E6A2-CW3C 500P/R 0.5M(4逓倍で使用)
振り子角検出用ロータリーエンコーダ:マイクロテックラボラトリー MES-12-2048PC(4逓倍で使用)
ACアダプター:ユニファイブ
UN110-0520-PL03B,UN110-3320-EIAJ-2
モータドライバ用レギュレータ電源:コーセル LFP240F-24-Y
POM板は レーザー加工機 Epilog
Mini24-60Wで加工,CADソフト RootPro CAD 9
実験動画1(TG-47H-SV-50-HB)
実験動画2(TG-47H-SV-10-HB)
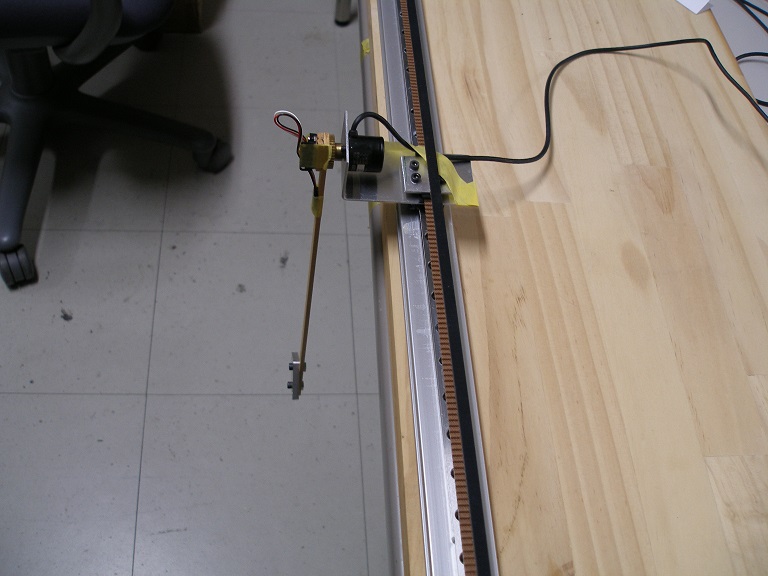
図56 倒立振子系(プーリーベルト駆動)+Arduino Due
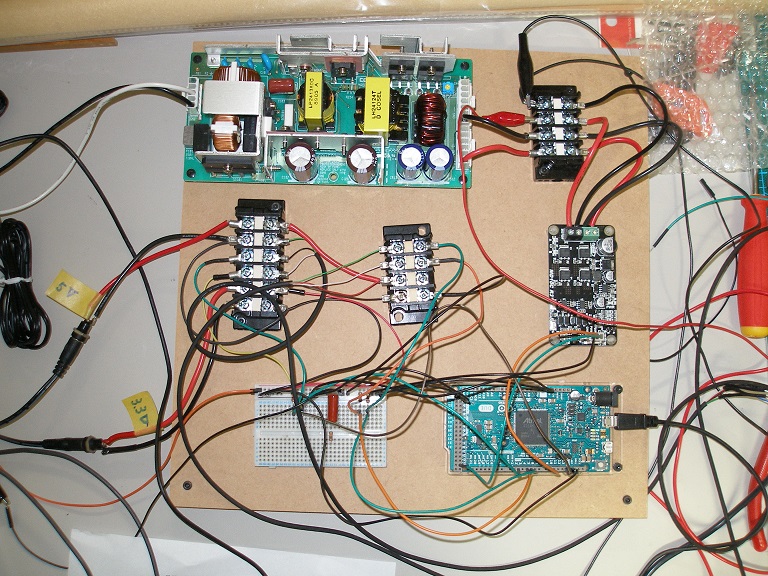
図57 倒立振子系(プーリーベルト駆動)+Arduino Due

図58 タワークレーン系+Arduino
Due(2023.1.31) 「企業実践インターンシップB」(通年,2単位)の一課題として後期に製作したプーリーベルト駆動系に回転機構と巻上げ機構を取り付けました。
駆動用ギヤドDCモータ:ツカサ電工
TG-321B-SV-50-HB,24V(アーム回転用),ツカサ電工
TG-47H-SV-50-HB,24V(トロリ駆動用),ツカサ電工ギヤドDCモータ TG-101C-GU-85.1-KB, 24V(巻上げ用)
モータドライバ:Cytron CYTRON-MD10C
モータシャフト回転角検出用ロータリーエンコーダ:オムロン E6A2-CW3C 500P/R 0.5M(4逓倍で使用)(アーム回転角,トロリ位置検出用)
振り子角検出用ポテンショメータ:緑測器
CP-2UN
ロープ長計測用ポテンショメータ:アルプス電気抵抗式ポジションセンサ RDC501015A
ACアダプター:ユニファイブ
UN110-0520-PL03B,UN110-3320-EIAJ-2
モータドライバ用レギュレータ電源:コーセル LFP240F-24-Y
POM板は レーザー加工機 Epilog
Mini24-60Wで加工,CADソフト RootPro CAD 9
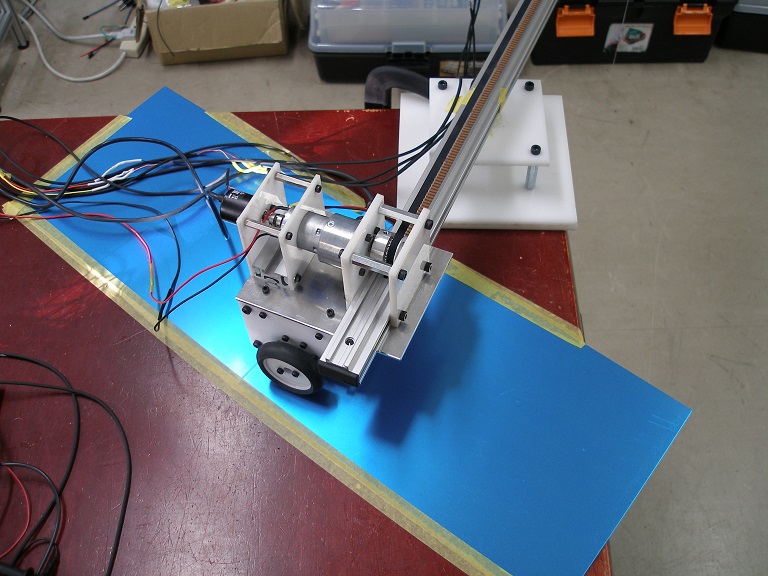
図59 タワークレーン系+Arduino Due
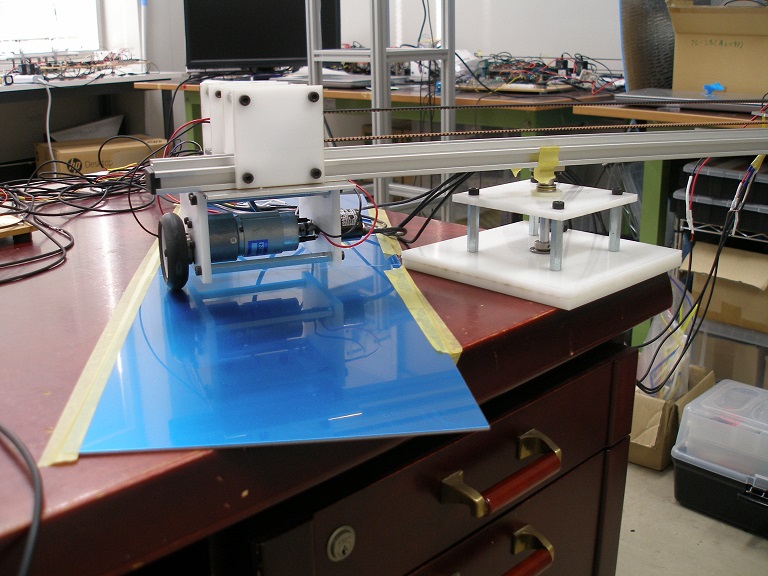
図60 タワークレーン系+Arduino Due
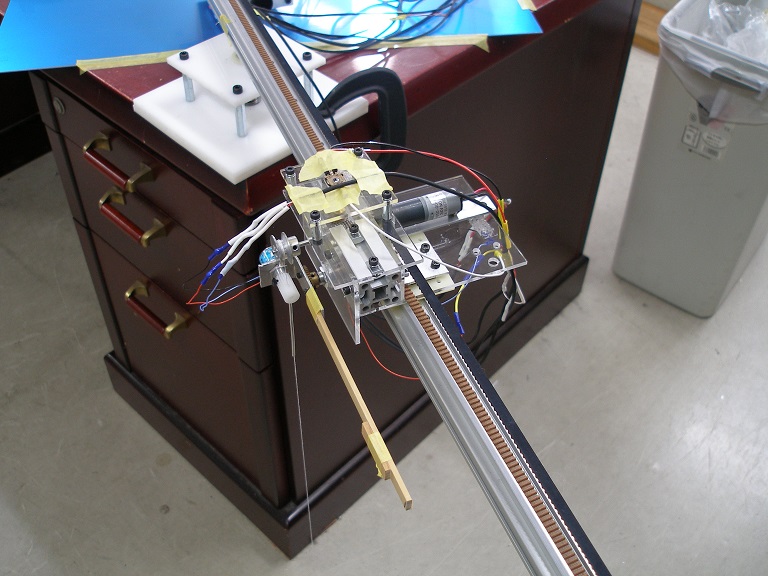
図61 タワークレーン系+Arduino Due
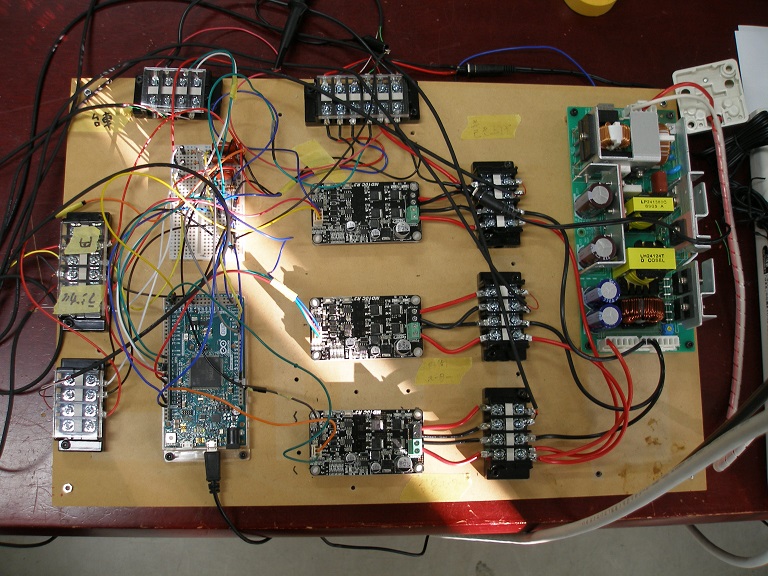
図62 タワークレーン系+Arduino Due

図63 倒立振子系(プーリーベルト駆動)+Arduino
Due(2023.2.13) 「企業実践インターンシップB」(通年,2単位)の一課題として後期に製作したプーリーベルト駆動系に振り子部を取り付けました。
図55の装置で,リニアガイドをドライリンNガイドレールサイズ17,長さ1000mmに交換しました。
駆動用ギヤドDCモータ:ツカサ電工
TG-47H-SV-(10, 20, 33 or 50)-HB,24V
モータドライバ:Cytron CYTRON-MD10C
モータシャフト回転角検出用ロータリーエンコーダ:オムロン E6A2-CW3C 500P/R 0.5M(4逓倍で使用)
振り子角検出用ロータリーエンコーダ:マイクロテックラボラトリー MES-12-2048PC(4逓倍で使用)
ACアダプター:ユニファイブ
UN110-0520-PL03B,UN110-3320-EIAJ-2
モータドライバ用レギュレータ電源:コーセル LFP240F-24-Y
POM板は レーザー加工機 Epilog
Mini24-60Wで加工,CADソフト RootPro CAD 9
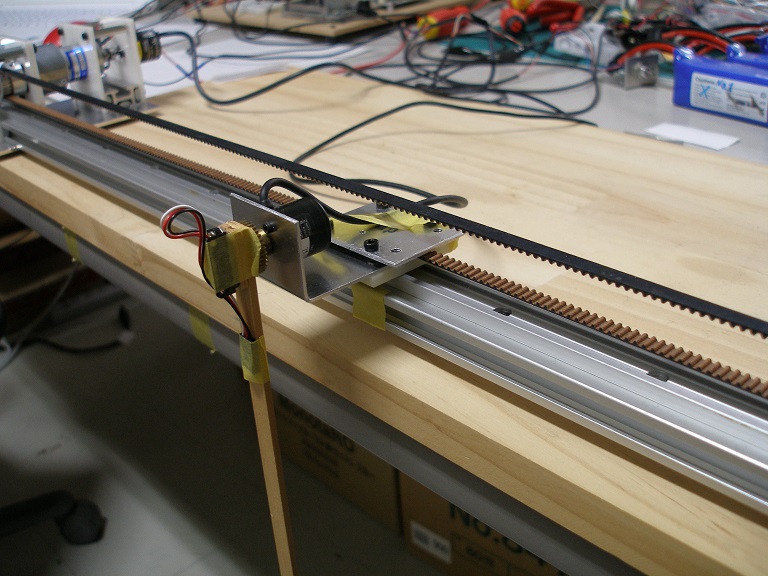
図64 倒立振子系(プーリーベルト駆動)+Arduino Due
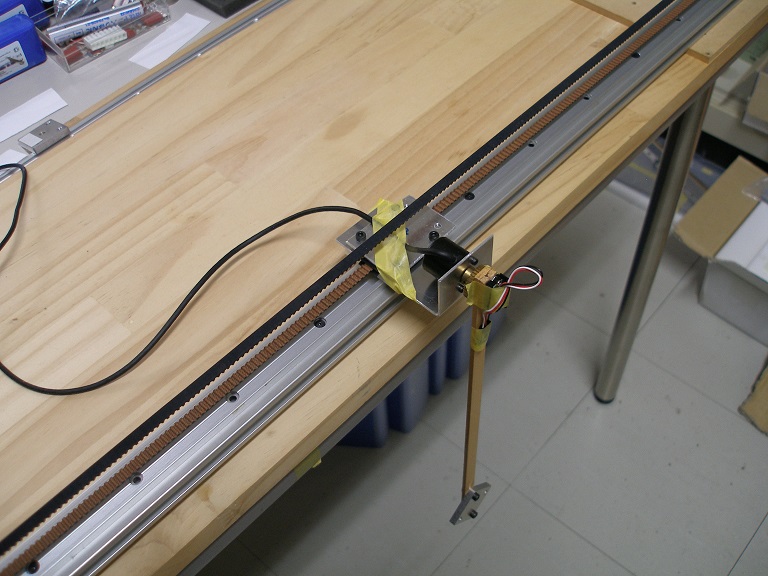
図65 倒立振子系(プーリーベルト駆動)+Arduino Due