台車系実験装置
本研究室で製作した,DCモータで駆動される台車系の実験装置を紹介します.DCモータはPWMドライバで駆動され,台車の位置はポテンショメータで測定されます.パソコンとDSP(エムティティ
s-BOX)をコントローラとして使用し,プログラミング言語は,DSP付属のC言語を用いました.PID制御や状態フィードバック制御などを用いた台車の位置決め制御実験ができます.
設計図は2次元汎用CADソフトRootPro CAD Standard(フリーソフト)で作成しました.指定寸法の部品を調達した場合,製作に必要な加工はボール盤による穴あけとタップによるねじ切り程度です.RootPro
CADで作成した図面を原寸大で印刷した紙を部品に貼るか,すでに穴を開けた部品を,穴を開けたい部品に重ねて穴の中心をペンでマークすれば,穴の位置をかなり正確に決めることができます.加工と組み立ての順にも注意します.ある程度の加工誤差は避けられないので,ボルト穴(ねじ切りをしない穴)の直径はねじ径よりも1割程度大きく加工します.また,ポテンショメータの軸は,セットスクリューの当たる部分をやすりで平面取りしておきます.潤滑のため,ピニオンとラックの歯面には適量のグリスを付けます.
DCモータの良好な制御のため,ラックとピニオン間のバックラッシュ(がた)はほぼゼロとします(台車を手で動かしてみて少し堅いかなという程度).本実験装置の場合,ラックと両ピニオンを密着させたところでラック支持板の位置を決め,その後,インクジェットプリンタ用紙をレールの下に2枚敷いて,かみ合いを調整しました.
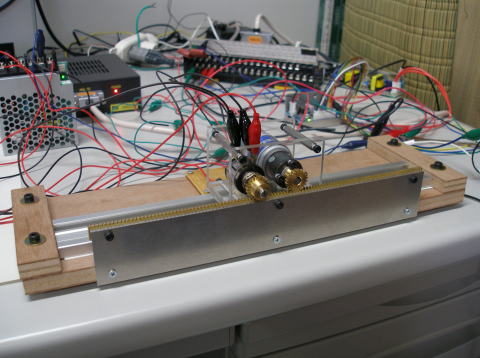
図1 台車系実験装置
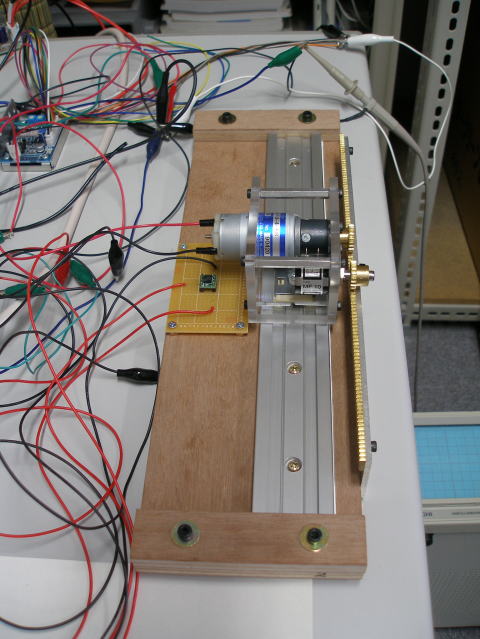
図2 台車系実験装置
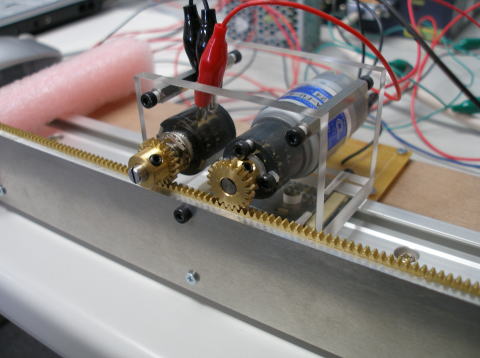
図3 台車系実験装置(台車部)
状態フィードバック制御による位置決め制御実験の動画(MPEGファイル) 閉ループ系の伝達関数を2次遅れ系として,矩形波の目標入力を与えました.
図面1(正面図)(PDF)
図面2(側面図その1)(PDF)
図面3(側面図その2)(PDF)
台車制御サンプルプログラム(cart_sample.c)
cart_sample.c の説明資料(PDF)
モータ特性曲線の計算プログラム(PDF)
部品表
| No. |
部品名 |
会社名 |
型番 |
個数 |
サイズ |
材質 |
備考 |
| 1 |
ギヤドDCモーター |
ツカサ電工 |
TG-70A-FU-4-KB,24V |
1 |
- |
- |
3.1W,減速比1/4 |
| 2 |
モータードライバ |
ツカサ電工 |
TCP-S30-300 |
1 |
- |
- |
PWM方式 |
| 3 |
ポテンショメータ |
日本電産サーボ |
MF10 1K |
1 |
- |
- |
10回転型 |
| 4 |
スイッチング電源 |
コーセル |
LCA50S-24 |
1 |
- |
- |
24V,60W,モータードライバ用 |
| 5 |
〃 |
〃 |
PBW15F-12-N |
1 |
- |
- |
±12V,16.8W,ポテンショメータ用 |
| 6 |
直動機器(レール) |
イグス |
NS-01-40-300 |
1 |
40×300mm |
アルミ合金,アルマイト処理 |
- |
| 7 |
直動機器(キャリッジ) |
〃 |
NW-02-40 |
1 |
40mm |
- |
- |
| 8 |
台車部枠(下) |
- |
- |
1 |
40×70×8mm |
アクリル樹脂 |
- |
| 9 |
台車部枠(前) |
- |
- |
1 |
50×70×5mm |
〃 |
- |
| 10 |
台車部枠(後) |
- |
- |
1 |
〃 |
〃 |
モーター用穴(φ30mm)加工指定 |
| 11 |
底板 |
- |
- |
1 |
110×350×12mm |
ラワンベニア合板 |
- |
| 12 |
側板 |
- |
- |
2 |
25×110×12mm |
〃 |
- |
| 13 |
ピニオン |
協育歯車工業 |
- |
2 |
ピッチ円直径15mm,モジュール0.75 |
黄銅 |
- |
| 14 |
ラック |
〃 |
- |
1 |
モジュール0.75,L=505mm |
〃 |
半分に切って使用 |
| 15 |
ラックの支持板 |
- |
- |
1 |
38×250×3mm |
ジュラルミン(A2017) |
- |
| 16 |
台車枠(スペーサー) |
- |
- |
2 |
M3 L=40mm |
ステンレス(SUS303) |
- |
| 17 |
六角穴付きボルト |
- |
- |
7 |
M3 L=6mm |
鋼 |
ラック,モーター固定用 |
| 18 |
〃 |
- |
- |
8 |
M3 L=10mm |
〃 |
台車枠固定用 |
| 19 |
〃 |
- |
- |
4 |
M4 L=30mm |
〃 |
側板固定用 |
| 20 |
六角ナット |
- |
- |
9 |
M4 |
〃 |
レール,側板固定用 |
| 21 |
ねじ |
- |
- |
5 |
M4 L=18mm |
〃 |
レール固定用 |
| 22 |
低頭ねじ |
- |
- |
2 |
M4 L=12mm |
〃 |
台車固定用 |
| 23 |
ワッシャー |
- |
- |
13 |
M4 D=14mm, t=1mm |
〃 |
レール,側板固定用 |
| 24 |
〃 |
- |
- |
2 |
M4 D=10mm, t=0.5mm |
〃 |
台車固定用 |
| 25 |
スプリングワッシャー |
- |
- |
2 |
M4 |
〃 |
〃 |
| 26 |
さら木ネジ |
- |
- |
3 |
Φ2.7mm L=13mm |
〃 |
ラック固定板用 |
最終更新日:2009年8月15日
戻る